|
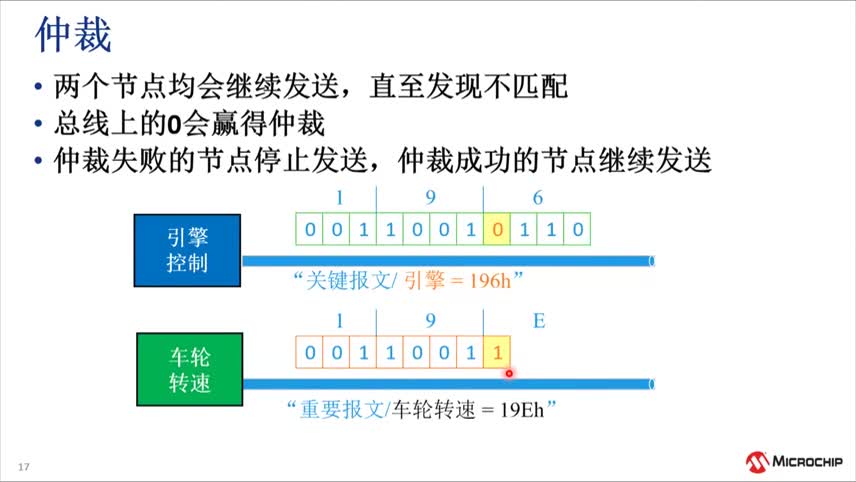
前言 隨著自動(dòng)化程度的提高和信息的網(wǎng)絡(luò)化進(jìn)程, 所需要的測(cè)控點(diǎn)和測(cè)控參量越來(lái)越多, 使得一個(gè)自動(dòng)控制系統(tǒng)日益龐大而復(fù)雜。對(duì)于一個(gè)系統(tǒng)來(lái)說(shuō), 需要的傳感器數(shù)目成倍增加。為了使各智能儀表與上位機(jī)能實(shí)時(shí)、高速、準(zhǔn)確地通信, 選擇較理想的現(xiàn)場(chǎng)總線則是很關(guān)鍵的。現(xiàn)場(chǎng)總線是開(kāi)放型控制系統(tǒng), 是用于現(xiàn)場(chǎng)總線儀表與控制室之間的一種全數(shù)字化、串行、雙向、多站的通訊網(wǎng)絡(luò) 。CAN 是其中很有發(fā)展前景的一種現(xiàn)場(chǎng)總線。在網(wǎng)絡(luò)化的系統(tǒng)中, 每只傳感器作為一個(gè)智能節(jié)點(diǎn)掛接在CAN 總線上, 整個(gè)系統(tǒng)如圖1所示。 圖1 CAN 總線系統(tǒng)框圖 1 CAN 總線的技術(shù)特點(diǎn) a) CAN 通信速率為(5kB/s)/10km、(1MB/s)/40m ,其節(jié)點(diǎn)數(shù)可達(dá)110 個(gè), 傳輸介質(zhì)采用雙絞線、同軸電纜和光纖等; b) 采用點(diǎn)對(duì)點(diǎn), 一點(diǎn)對(duì)多點(diǎn)及全局廣播等幾種方式發(fā)送接收數(shù)據(jù); c) 采用非破壞性總線優(yōu)先級(jí)仲裁技術(shù)。當(dāng)兩個(gè)節(jié)點(diǎn)同時(shí)向網(wǎng)絡(luò)上發(fā)送信息時(shí)優(yōu)先級(jí)低的節(jié)點(diǎn)主動(dòng)停止發(fā)送數(shù)據(jù), 而優(yōu)先級(jí)高的節(jié)點(diǎn)可不受影響地繼續(xù)發(fā)送信息。因此。按節(jié)點(diǎn)類型分成不同的優(yōu)先級(jí), 可以滿足不同的實(shí)時(shí)要求; d) 可實(shí)現(xiàn)全分布式多機(jī)系統(tǒng), 且無(wú)主、從機(jī)之分, 每個(gè)節(jié)點(diǎn)均主動(dòng)發(fā)送報(bào)文, 用此特點(diǎn)可以方便地構(gòu)成多機(jī)備份系統(tǒng); e) 支持四類報(bào)文幀: 數(shù)據(jù)幀、遠(yuǎn)程幀、出錯(cuò)幀、超載幀。它采用短幀結(jié)構(gòu), 每幀有效字節(jié)數(shù)為8 個(gè)。 這樣, 傳輸時(shí)間短, 受干擾的概率低, 且具有較好的檢錯(cuò)結(jié)果。 此外, CAN 采用循環(huán)冗余校驗(yàn); 其節(jié)點(diǎn)具有自動(dòng)關(guān)閉的功能。由于帶有CAN 總線接口的傳感器種類還不多, 價(jià)格也較貴, 為了使總線能與上位機(jī)更好的實(shí)時(shí)的通信, 可以自行設(shè)計(jì)一種由8051 單片機(jī)和SJAl000 獨(dú)立CAN 總線控制為核心構(gòu)成的智能節(jié)點(diǎn)。在普通傳感器基礎(chǔ)上形成可接收8 路模擬量輸入的智能傳感器網(wǎng)絡(luò)。 2 SJAl000 的硬件結(jié)構(gòu)和功能 如圖2 所示, SJAl000從邏輯上可分為7 個(gè)部分: a) IML (接口管理邏輯) IML 用于解釋來(lái)自CPU 的命令, 分配信息緩沖區(qū)并向CPU 提供中斷及狀態(tài)信息; b) 發(fā)送緩沖區(qū)TXB 13 字節(jié)長(zhǎng)存儲(chǔ)器, 外部CPU 將要發(fā)送的信息寫(xiě)入此緩沖區(qū); c) 接收緩沖區(qū)RXB 接收緩沖區(qū)為64 字節(jié)的CPU 接收信息的FIFO 寄存器; d) 接收過(guò)濾器ACF 對(duì)接收到的信息ID 與ACF 內(nèi)容相比較以決定是否接收信息; e) 位流處理器BSP 用來(lái)控制發(fā)送、接收緩沖區(qū)及CAN 總線的數(shù)據(jù)流; f) 定時(shí)邏輯BTL 用于控制CAN 總線上數(shù)據(jù)的傳輸速率與同步; g) 錯(cuò)誤管理邏輯EML 按CAN 協(xié)議進(jìn)行錯(cuò)誤管理。 圖2 SJAl000 邏輯框圖 3 CAN 總線在智能傳感器網(wǎng)絡(luò)中的應(yīng)用 以一路信號(hào)采集為例。圖3 是CAN 控制器和收發(fā)器與單片機(jī)及ADC0809 的接口電路圖。CAN 控制器采用PHILIPS SJA1000 , 單片機(jī)采用89C51 , 主要完成信號(hào)的采集和對(duì)信號(hào)的預(yù)處理, 并把經(jīng)過(guò)處理的數(shù)據(jù)傳給上位機(jī)。82C250 是CAN 控制器SJA1000 與CAN 物理總線的接口器件, 它驅(qū)動(dòng)總線差動(dòng)接收或發(fā)送。考慮到現(xiàn)場(chǎng)有各種各樣的干擾, 在CAN 控制器和驅(qū)動(dòng)器之間加了高速光耦隔離器件(6N137) 。由于CAN 控制器和反饋控制器內(nèi)部都有自己的時(shí)鐘產(chǎn)生電路, 為了使兩者協(xié)調(diào), 外加的晶振在CAN 控制器上作為整個(gè)系統(tǒng)的時(shí)鐘, 且將CAN 控制器的時(shí)鐘輸出作為微控制器的時(shí)鐘輸入; SJAl000 的中斷輸出接至CPU 的INT1 端; 通過(guò)中斷方式實(shí)現(xiàn)單片機(jī)與CAN 控制器的通信; 同時(shí)為了使CAN 控制器和微控制器能同時(shí)可靠復(fù)位, 外加了手動(dòng)復(fù)位電路。另外, 由于ADC0809 轉(zhuǎn)換器具有三態(tài)輸出鎖存功能, 可以直接與89C51 的總線相連, 在系統(tǒng)中把ADC0809 轉(zhuǎn)換器當(dāng)作外部RAM單元對(duì)待。 圖3 硬件電路圖 4 軟件設(shè)計(jì) 智能傳感器作為一個(gè)節(jié)點(diǎn)的軟件設(shè)計(jì)主要包括兩部分: 一部分為初始化單片機(jī)和SJAl000 , 另一部分為節(jié)點(diǎn)實(shí)際要完成的數(shù)據(jù)采集和對(duì)執(zhí)行機(jī)構(gòu)的控制功能。對(duì)CAN 控制器的初始化, 對(duì)各個(gè)寄存器分別寫(xiě)入不同的內(nèi)容, 其中CAN 控制器與單片機(jī)之間采用中斷方式通信。其流程如圖4 所示。 圖4 中斷流程圖 SJAl000 的初始化程序?yàn)? MOVA , # 0BH 04H 為ACR 寄存器地址 00H 為CR 寄存器的地址 MOVDPTR , # 8000H MOVX@DPTR , A開(kāi)放錯(cuò)誤和接收中斷, SJA1000 進(jìn)入復(fù)位模式 MOVDPTR , # 8004H MOVA , # 02H MOVX@DPTR , A INC DPTR05H 為AMR 寄存器地址。設(shè)為全部收 MOVA , # FFH MOVX@DPTR , A INC DPTR MOVA , # 01H06H 為BTR0 的寄存器地址 MOVX@DPTR , A INC DPTR MOVA , # FFH07H 為BTRl 的寄存器地址, 寫(xiě)B(tài)TR0 和BTRl , 波特率設(shè)為160K MOVX@DPTR , A INC DPTR MOVA , # 0AH08H 為OCR 寄存器地址, SJAl000 采用正常模式輸出 MOVX@DPTR , A MOVA , # OFH MOVDPTR , # 801FH 1FH 為CDR 寄存器地址, 使微控制器與SJAl000 的時(shí)鐘相同 MOVX@DPTR , A MOVA , # 0AH MOVDPTR , # 8000H MOVX@DPTR , A寫(xiě)CR 寄存器使SJAl000 進(jìn)入工作模式 RET 5 結(jié)語(yǔ) 將CAN 總線應(yīng)用于智能傳感器中, 使傳感器獲得的信號(hào)能通過(guò)總線實(shí)時(shí)地、可靠地、高速而準(zhǔn)確地進(jìn)行傳輸。同時(shí), 由于整個(gè)智能傳感器網(wǎng)絡(luò)采用全數(shù)字化的通信, 因此總線也具有很好的抗干擾能力, 即使在重負(fù)荷下也不會(huì)出現(xiàn)網(wǎng)絡(luò)癱瘓的情況, 這些優(yōu)越性能是其它現(xiàn)場(chǎng)總線所不及的。 |