|
1��ǧ����̫�W(w��ng)���g(sh��)��(ji��n)�� ��̫�W(w��ng)���g(sh��)�Ǯ�(d��ng)��(y��ng)�ÏV���ľW(w��ng)�j(lu��)���g(sh��)��ǧ����̫�W(w��ng)���g(sh��)�^����������̫�W(w��ng)���g(sh��)���S����(y��u)�c(di��n)��ͬ�r(sh��)�־����S���µ����ԣ������ݔ���|(zh��)�������w���~�|��ʹ��8B/10B�ľ���a�����������d���U(ku��)չ�ͷֽMͻ�l(f��)���g(sh��)�ȡ�������?y��n)�������õ��^���Ժ��S����(y��u)��������ԣ�ǧ����̫�W(w��ng)�ѽ�(j��ng)�ɞ�Ŀǰ����W(w��ng)��������Q������ ǧ����̫�W(w��ng)������ԭ��̫�W(w��ng)��(bi��o)��(zh��n)��Ҏ(gu��)����ȫ�����g(sh��)Ҏ(gu��)�������а���CSMA/CD�f(xi��)�h����̫�W(w��ng)����ȫ�p�������������Լ�IEEE 802.3��(bi��o)��(zh��n)�������x�Ĺ��팦(du��)��ǧ����̫�W(w��ng)���P(gu��n)�I���g(sh��)��ǧ����̫�W(w��ng)���ӣ�MAC�ӣ��Ľ��Q�c��̫�W(w��ng)�ӿڵČ�(sh��)�F(xi��n)���S����ý�w��(y��ng)�õ��ռ���ǧ����̫�W(w��ng)�،��ɞ�����̫�W(w��ng)���g(sh��)������܊�� 2��Xilinx��ǧ����̫�W(w��ng)��Q���� 1��IP��֧�� Xilinx�ṩ�˿Ʌ���(sh��)����10/1Gbps��̫�W(w��ng)ý�w�L������������LogiCORE��Q������ԓ���O(sh��)Ӌ(j��)�Á�ͬ���µ�Virtex-5��Virtex-4��Virtex-II Proƽ�_(t��i)FPGAһ�����������ԟo�p���ɵ�Xilinx�O(sh��)Ӌ(j��)�����С������ؼ�(j��)��̫�W(w��ng)ý�w�L���������ˣ�GEMAC����ᘌ�(du��)1Gb/s��Gbps����̫�W(w��ng)ý�w�L�����������ܵĿɅ���(sh��)����LogiCORE IP��Q������GEMAC�˵��O(sh��)Ӌ(j��)���� IEEE 802.3-2002Ҏ(gu��)����GWMAC��֧�փɂ�(g��)PHY�˽ӿ��x�(xi��ng)��GMII��RGMII�����ң�Xilinx ȫ���1Gb/s��̫�W(w��ng)��Q��������������MAC��PCS/PMA IP�ˮa(ch��n)Ʒ��Xilinx��������̫�W(w��ng)MAC��Q����߀�������Ѓ�(n��i)��̎��������������PLB���ӿڣ�PLB GEMAC�������á�ԓ����ͨ�^XilinxǶ��ʽ�_�l(f��)����EDK���ṩ��GEMAC LogiCORE IP���Ԍ�(sh��)�F(xi��n)�c1000 Base-X PCS/PMA��SGMII�˵ğo�p���ɣ����ṩ3�N�x�(xi��ng)�Á��cPHY�����ӿڣ�1000 BASE-X��10λ�ӿڣ�TBI����SGMII�� GEMAC�˷dz��m���_�l(f��)���ܶȼ����ؼ�(j��)��̫�W(w��ng)ͨ�źʹ惦(ch��)�O(sh��)�䣬���P(gu��n)�I�����У�
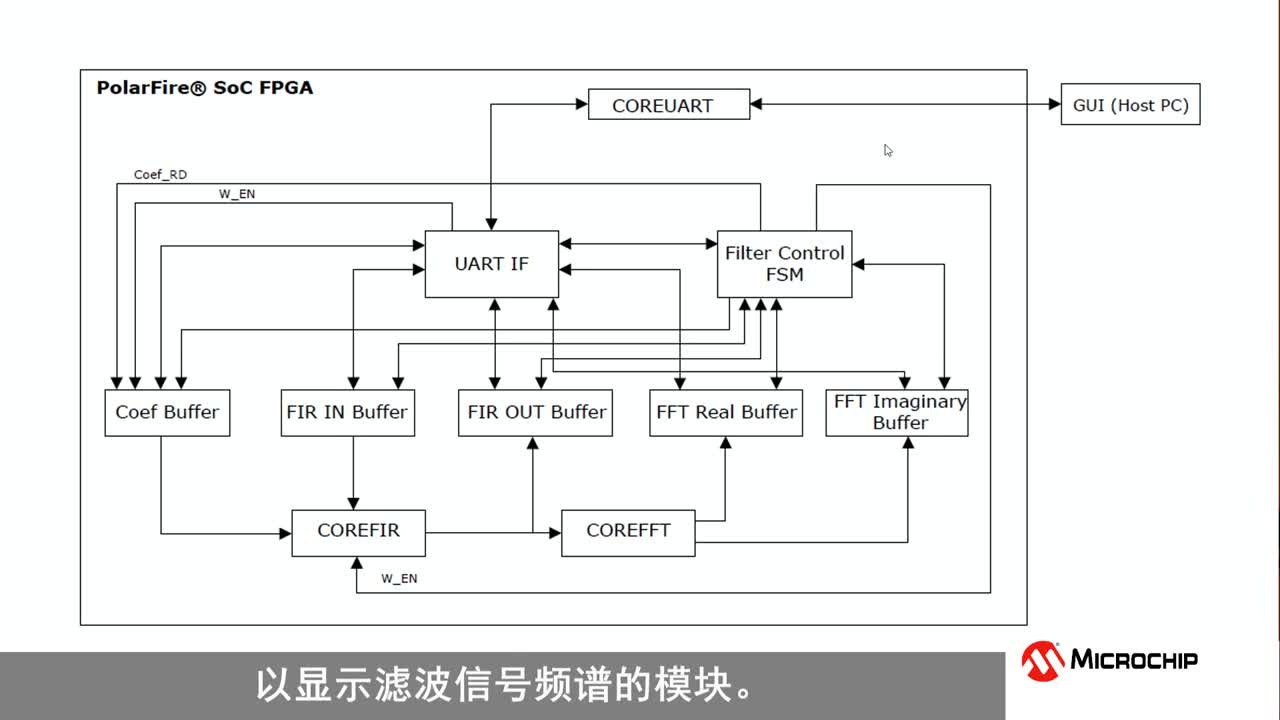
2������(y��ng)���_�l(f��)���� Xilinx�ṩ��ǧ����̫�W(w��ng)�_�l(f��)����Virtex-5 ML505/ML506�_�l(f��)�壨ʹ�õ�FPGAоƬ�飺XC5VLX50T-1FF1136����ԓ�_�l(f��)��֧��10/100�ס�1/10����̫�W(w��ng)������Xilinx���_�Ļ���ML505/506���O(sh��)Ӌ(j��)���ɞ������̫�W(w��ng)�_�l(f��)���O(sh��)Ӌ(j��)�ṩȫ��λ�ą��������⣬ML505/506߀�߂�SFP��PCI E��SATA�Լ�SMA�ӿڵ����༪���ؽӿڣ��njW(xu��)��(x��)���аl(f��)�����B���O(sh��)�������ƽ�_(t��i)�� 10.4.2 ����FPGA��ǧ����̫�W(w��ng)MAC��������(sh��)�F(xi��n)���� 1�����w�O(sh��)Ӌ(j��)���� ��̫�W(w��ng)��������FPGA�O(sh��)Ӌ(j��)����������̫�W(w��ng)MAC�ӌӵ�FPGA�O(sh��)Ӌ(j��)��MAC�ӌ��c�όӅf(xi��)�h�Ľӿ��O(sh��)Ӌ(j��)�Լ�MAC�c����ӣ�PHY����MII�ӿ��O(sh��)Ӌ(j��)��ԓ��̫�W(w��ng)�������Ŀ��w�Y(ji��)��(g��u)�O(sh��)Ӌ(j��)��D��D10-30��ʾ������(g��)ϵ�y(t��ng)�֞�l(f��)��ģ�K������ģ�K��MAC��B(t��i)ģ�K��MAC����ģ�K��MII����ģ�K�����C(j��)�ӿ�ģ�K�����֡��l(f��)��ģ�K�ͽ���ģ�K��Ҫ�ṩMAC���İl(f��)�ͺͽ��չ��ܣ�����Ҫ������MAC���ķ��b�c����Լ��e(cu��)�`�z�y(c��)����ֱ���ṩ�˵��ⲿ�����оƬ�IJ��Д�(sh��)��(j��)�ӿڡ��ڌ�(sh��)�F(xi��n)�������̎��ֱ���������õ�ǧ��PHYоƬ����Ҫ�_�l(f��)��������MAC���������_�l(f��)�ϡ� �D10-30 ��̫�W(w��ng)�������ĽY(ji��)��(g��u)�O(sh��)Ӌ(j��)��D MAC����ģ�K�t���ڈ�(zh��)��ȫ�p��ģʽ�е��������ƹ��ܡ�MAC��B(t��i)ģ�K���Á��O(ji��n)ҕMAC�����^�̵ĸ��N��B(t��i)��Ϣ�������ġ�MII����ģ�K�ṩ�˘�(bi��o)��(zh��n)��IEEE 802.3���|(zh��)��(d��)���ӿڣ��������B����̫�W(w��ng)���·���c����ӡ����C(j��)�ӿڄt�ṩ��̫�W(w��ng)�������c�όӅf(xi��)�h����TCP/IP�f(xi��)�h��֮�g�Ľӿڣ������ڔ�(sh��)��(j��)�İl(f��)�͡������Լ���(du��)��������(n��i)���N�Ĵ��������ơ���B(t��i)������Ĵ��������O(sh��)�á� 2��MAC�������Y(ji��)��(g��u)�������� 1��MAC�l(f��)��ģ�K MAC�l(f��)��ģ�K�Ɍ��όӅf(xi��)�h�ṩ�Ĕ�(sh��)��(j��)���b֮��ͨ�^MII�ӿڰl(f��)�ͽoPHY���l(f��)��ģ�K�ɽ������C(j��)�ӿ�ģ�K�Ĕ�(sh��)��(j��)���_ʼ�͔�(sh��)��(j��)���Y(ji��)����(bi��o)־����ͨ�^���C(j��)�ӿڏ��ⲿ�惦(ch��)�����xȡҪ�l(f��)�͵Ĕ�(sh��)��(j��)��Ȼ��(du��)��(sh��)��(j��)�M(j��n)�з��b����ͨ�^PHY�ṩ���d���� �͛_ͻ�z�y(c��)��̖(h��o)�����ŵ����e�r(sh��)��MII�ӿڌ���(sh��)��(j��)��4λ�Č��Ȱl(f��)�ͽoPHYоƬ�������PHY����(sh��)��(j��)�l(f��)�͵��W(w��ng)�j(lu��)�ϡ� �l(f��)��ģ�K��CRC����ģ�K��crc_gen�����S�C(j��)��(sh��)����ģ�K��random_gen�����l(f��)��Ӌ(j��)��(sh��)ģ�K��tx_cnt���Ͱl(f��)�͠�B(t��i)�C(j��)��tx_statem_machine��ģ�K���Ă�(g��)��Ҫ��ģ�K�M�ɣ����(n��i)���Y(ji��)��(g��u)��D10-31��ʾ�� �D10-31 ��̫�W(w��ng)MAC�l(f��)��ģ�K�ĽY(ji��)��(g��u)ʾ��D �l(f��)�͠�B(t��i)�C(j��)��Idle_State��Preamble_State��Data0_State��Data1_State��PAD_State��FCS_State��IPG_State��Jam_State��BackOff_State��Defer_State ��ʮ��(g��)��B(t��i)�M�ɡ����B(t��i)�D(zhu��n)�ƈD��D10-32��ʾ�� �D10-32 �l(f��)�͠�B(t��i)�C(j��)�Ġ�B(t��i)�D(zhu��n)�ƈD ϵ�y(t��ng)��(f��)λ�l(f��)��ģ�K���M(j��n)��Defer_State��B(t��i)����һֱ�z�y(c��)�d���� ��CarrierSense����̖(h��o)����(d��ng)�d���� ��̖(h��o)׃�ɟoЧ����ʾ�ŵ����e���r(sh��)����B(t��i)�C(j��)�M(j��n)��IPG_State��B(t��i)���˺��ڵȴ�һ��(g��)���g�g϶֮��B(t��i)�C(j��)�M(j��n)��Idle_State��B(t��i)������ڎ��g�g϶��ǰ2/3��(g��)���ڙz�y(c��)���ŵ�æ��̖(h��o)����B(t��i)�C(j��)�����»ص�Defer_State��B(t��i)�� ��B(t��i)�C(j��)�M(j��n)��Idle_State��B(t��i)֮�l(f��)��ģ�K���z�y(c��)�d���� ��̖(h��o)�����C(j��)�ӿڵİl(f��)��Ո(q��ng)�������C(j��)ģ�KՈ(q��ng)��l(f��)�ͣ���B(t��i)�C(j��)���M(j��n)��Preamble_State��B(t��i)���l(f��)��ģ�K��֪ͨPHY�l(f��)���_ʼ��ͬ�r(sh��)�_ʼ�l(f��)��ǰ��a��7��(g��)0x5��, Ȼ��l(f��)�͎���ʼ�������SFD, 0xd������B(t��i)�C(j��)�M(j��n)��Data0_State�l(f��)��ģ�K���l(f��)��һ��(g��)��(sh��)��(j��)�ֹ�(ji��)�ĵ�4λ��LSB nibble������(d��ng)���M(j��n)��Data1_State��B(t��i)�l(f��)��ģ�K�t�l(f��)�͔�(sh��)��(j��)�ֹ�(ji��)�ĸ�4λ��MSB nibble�����S��B(t��i)�C(j��)һֱ��data0��data1֮�gѭ�h(hu��n)��ֱ����(sh��)��(j��)�l(f��)���ꮅ����(d��ng)߀ʣһ��(g��)�ֹ�(ji��)�r(sh��)�����C(j��)ģ�K��ͨ�^�l(f��)�͎��Y(ji��)����̖(h��o)��֪ͨ�l(f��)��ģ�K�������(sh��)��(j��)�����L(zh��ng)�ȴ�����С������С�������B(t��i)�C(j��)���M(j��n)��FCS_State��B(t��i)���˕r(sh��)�l(f��)��ģ�K�t��CRC����ģ�K���ɵ�CRCֵ���ӵ�����FCS�ֶ��в��l(f��)�ͽoPHY�� ���l(f��)����֮��B(t��i)�C(j��)�M(j��n)��Defer_State ��B(t��i)��֮����IPG_State��Idle_State��B(t��i)���˺��B(t��i)�C(j��)�ֻص���ʼ��B(t��i)�������µȴ��µİl(f��)��Ո(q��ng)�������(sh��)��(j��)�����L(zh��ng)��С����̎�����B(t��i)�C(j��)���M(j��n)��PAD_State��B(t��i)���l(f��)��ģ�K����(j��)ϵ�y(t��ng)�O(sh��)�ô_���Ƿ��ڔ�(sh��)��(j��)֮���������a��Ȼ��B(t��i)�C(j��)�M(j��n)��FCS_State��B(t��i)�������(sh��)��(j��)�����L(zh��ng)�ȴ��������ϵ�y(t��ng)�O(sh��)����֧�ְl(f��)�ͳ��L(zh��ng)������ô����B(t��i)�C(j��)���M(j��n)��FCS_State��B(t��i)�������֧�ְl(f��)�ͳ��L(zh��ng)�����l(f��)��ģ�K���ŗ��l(f��)�ͣ���B(t��i)�C(j��)ֱ���M(j��n)��Defer��B(t��i)��Ȼ����IPG��B(t��i)�����ص�Idle��B(t��i)�� �ڰl(f��)�͔�(sh��)��(j��)���^���У��l(f��)��ģ�K��(hu��)һֱ�z��_ͻ�z�y(c��)��̖(h��o)��collision detected��������l(f��)�F(xi��n)�_ͻ�Ҡ�B(t��i)�C(j��)��̎��Preamble_State����B(t��i)�C(j��)���ڰl(f��)����ǰ��a��SFD֮���M(j��n)��Jam_State�����l(f��)�͓����a��Ȼ���M(j��n)��BackOff��B(t��i)���Եȴ���ԇ��֮��B(t��i)�C(j��)��(j��ng)�^Defer��IPG�ص�Idle��B(t��i)������˕r(sh��)��ԇ�Δ�(sh��)Ӌ(j��)��(sh��)����ֵ�]���_(d��)���~��ֵ���l(f��)��ģ�K�������_ʼ�l(f��)�̈́��ŵĎ���������ԇ�Δ�(sh��)Ӌ(j��)��(sh��)����ֵ��1������l(f��)�F(xi��n)�_ͻ�Ҡ�B(t��i)�C(j��)̎��data0��data1��FCS��B(t��i)�����қ]�г��^�_ͻ�r(sh��)�g������ô��B(t��i)�C(j��)���R���M(j��n)��Jam��B(t��i)�l(f��)�͓����a��֮��(j��ng)�^BackOff��Defer��IPG���ص�Idle��������(j��)��ԇӋ(j��)��(sh��)����ֵ�Q���Ƿ����°l(f��)�̈́��ŵĔ�(sh��)��(j��)��������z�y(c��)���l(f��)���_ͻ�ĕr(sh��)�g���^�˛_ͻ�r(sh��)�g������B(t��i)�C(j��)���M(j��n)��Defer��B(t��i)��Ȼ��(j��ng)�^IPG��IDLE��B(t��i)�����ŗ���ԇ�� ��ȫ�p��ģʽ�аl(f��)�͎��r(sh��)������(hu��)�M(j��n)�����t��defer��, �l(f��)�͵��^����Ҳ����(hu��)�a(ch��n)���_ͻ���˕r(sh��)���l(f��)��ģ�K������PHY���d���� �͛_ͻ�z�y(c��)��̖(h��o)����(d��ng)Ȼ�����c��֮�g��Ȼ�����؎��g�g϶��Ҏ(gu��)�t����ˣ�ȫ�p��ģʽ�µİl(f��)�͠�B(t��i)�C(j��)�]��Jam_State��BackOff_State��Defer_State����(g��)��B(t��i)�� 2��MAC����ģ�K MAC����ģ�K�Y(ji��)��(g��u)��D10-33��ʾ��ؓ(f��)؟(z��)��(sh��)��(j��)���Ľ��ա���(d��ng)�ⲿPHY��ͨ���ŵ��Ĵ��Д�(sh��)��(j��)�D(zhu��n)�Q����ֹ�(ji��)�L(zh��ng)�IJ��Д�(sh��)��(j��)���l(f��)�ͽo����ģ�K����ģ�K��(hu��)���@Щ���ֹ�(ji��)��(sh��)��(j��)�D(zhu��n)�Q���ֹ�(ji��)��(sh��)��(j��)��Ȼ��(j��ng)�^��ַ�R(sh��)�e��CRCУ�(y��n)���L(zh��ng)���Д�Ȳ�������ͨ�^���C(j��)�ӿڌ����ⲿ�惦(ch��)�����������C(j��)�ӿ�ģ�K�Ľ����(du��)����ӛ䛎������P(gu��n)��Ϣ�����⣬����ģ�K߀ؓ(f��)؟(z��)ǰ��a��CRC���Ƴ��� �D10-33 ��̫�W(w��ng)MAC����ģ�K�ĽY(ji��)��(g��u)ʾ��D �����^�̵Ľ��ՠ�B(t��i)�C(j��)��Idle_State��Drop_State��Preamble_State��SFD_State��Data0_State��Data1_State������(g��)��B(t��i)�M��, ���B(t��i)�D(zhu��n)�ƈD��D10-34��ʾ�� �D10-34 ���ՠ�B(t��i)�C(j��)�Ġ�B(t��i)�D(zhu��n)�ƈD ��(d��ng)����ģ�K�z�y(c��)����(sh��)��(j��)��Ч��̖(h��o)֮��,����B(t��i)�C(j��)���M(j��n)��Preamble_State�����_ʼ����ǰ��a���˺��B(t��i)�C(j��)�M(j��n)��SFD_State������һ��(g��)�ֹ�(ji��)�Ď���ʼ�������֮�����(j��)IFGcntӋ(j��)��(sh��)����ֵ�M(j��n)�벻ͬ�Ġ�B(t��i)�����IFGcnt���_���ĕr(sh��)�g����96��(g��)���ؕr(sh��)�g����B(t��i)�C(j��)���M(j��n)��Data0��B(t��i)�Խ����ֹ�(ji��)�ĵ�4λ��Ȼ����Data1��B(t��i)���������ֹ�(ji��)�ĸ�4λ��֮���ֻص�Data0��B(t��i)����B(t��i)�C(j��)��һֱ���@�ɂ�(g��)��B(t��i)֮�gѭ�h(hu��n)��ֱ����(sh��)��(j��)�����ꮅ��PHY���MRxDV��̖(h��o)�����M(j��n)��Idle�������µȴ������µĔ�(sh��)��(j��)��������յ�����ʼ������r(sh��)��IFGcntӋ(j��)��(sh��)�����_���ĕr(sh��)�gС��96��(g��)���ؕr(sh��)�g����ô��B(t��i)�C(j��)���M(j��n)��Drop_State��B(t��i)����һֱ�S��ԓ��B(t��i)ֱ����(sh��)��(j��)��Ч��̖(h��o)�Y(ji��)����PHY���MRxDV��̖(h��o)����֮��B(t��i)�C(j��)�ٻص�Idle�ȴ������µĔ�(sh��)��(j��)������ڽ���ǰ��a������ʼ������͔�(sh��)��(j��)���g����(sh��)��(j��)��Ч��̖(h��o)���������ô��B(t��i)�C(j��)���ص�Idle�� 3��MII����ģ�K MII����ģ�K���ڿ���MAC�c�ⲿPHY֮�g�Ľӿڣ����ڌ�(du��)PHY�M(j��n)�����ò��xȡ���B(t��i)��Ϣ��ԓ�ӿ��ɕr(sh��)���̖(h��o)MDC���p��(sh��)��(j��)��̖(h��o)MDIO�M�ɡ�MII����ģ�K�t�ɕr(sh��)�����ģ�K����λ�Ĵ���ģ�K��ݔ������ģ�K�����ֽM�ɡ� �r(sh��)�����ģ�K���Ը���(j��)ϵ�y(t��ng)�r(sh��)犺�ϵ�y(t��ng)�O(sh��)���еķ��lϵ��(sh��)���a(ch��n)��MII ����ģ�K�ĕr(sh��)���̖(h��o)MDC��10 Mbps���ʕr(sh��)��2.5 MHz, 100 Mbps���ʕr(sh��)��25 MHz������λ�Ĵ���ģ�K�ȿ����ڌ�(du��)PHY�Ŀ��Ɣ�(sh��)��(j��)�M(j��n)�Ќ��������Ҳ�����ڌ�(du��)PHY�Ġ�B(t��i)��Ϣ�M(j��n)���x�������������Ɣ�(sh��)��(j��)�r(sh��)����λ�Ĵ�������(j��)����ģ�K�Ŀ�����̖(h��o)�����п��Ɣ�(sh��)��(j��)�D(zhu��n)�Q�鴮�Д�(sh��)��(j��)�������x��B(t��i)��Ϣ�r(sh��)����λ�Ĵ����t��PHY�Ĵ��Д�(sh��)��(j��)�D(zhu��n)�Q�鲢�Д�(sh��)��(j��)��MAC�е�����ģ�K�Ɍ�ԓ���Д�(sh��)��(j��)�����m��(d��ng)?sh��)ļĴ����? ����MDIO���p����̖(h��o)�����ݔ������ģ�K���Á�Q��MDIO��̎��ݔ���B(t��i)߀��ݔ����B(t��i)����(d��ng)MDIO̎��ݔ����B(t��i)�r(sh��)����λ�Ĵ���ݔ���Ĵ��п��Ɣ�(sh��)��(j��)�ڽ�(j��ng)�^�r(sh��)�ͬ����l(f��)�͵�PHY����(d��ng)MDIO̎��ݔ���B(t��i)�r(sh��)����λ�Ĵ�������(sh��)��(j��)���ϵĴ��Д�(sh��)��(j��)�D(zhu��n)�Q�鲢�Д�(sh��)��(j��) 4�����C(j��)�ӿ�ģ�K ���C(j��)�ӿ����\(y��n)����̫�W(w��ng)���όӅf(xi��)�h����TCP/IP�f(xi��)�h���cMAC�������Ľӿڡ�ͨ�^ԓ�ӿڣ��όӅf(xi��)�h�����O(sh��)��MAC�Ĺ���ģʽ���xȡMAC�Ġ�B(t��i)��Ϣ��ԓ�ӿ�߀�������όӅf(xi��)�h�cMAC֮�g�Ĕ�(sh��)��(j��)���Q�� ���C(j��)�ӿ�ģ�K��(n��i)��һ�M�Ĵ����������ڴ惦(ch��)�όӅf(xi��)�h��(du��)MAC�O(sh��)�õą���(sh��)�Լ�MAC�Ġ�B(t��i)��Ϣ���όӅf(xi��)�h��(du��)MAC�O(sh��)�õą���(sh��)�������ճ��̎���ʹ�ܡ��������aʹ�ܡ��l(f��)�ͳ��L(zh��ng)����ʹ�ܡ�����CRCУ�(y��n)ֵʹ�ܡ�ȫ�p��ģʽ����p��ģʽ���ֳ��L(zh��ng)���tʹ�ܡ����sģʽ��Promiscuous�������ՏV����ʹ�ܡ��l(f��)�ͺͽ���ʹ�ܡ��Д�Դ���Д�ʹ�ܡ����g�g϶���L(zh��ng)�ȡ������С�����L(zh��ng)�ȡ���ԇ���ƺ͛_ͻ�r(sh��)�g����MII��ַ��MII����������պͰl(f��)���(du��)�е��L(zh��ng)���Լ����C(j��)MAC��ַ�ȡ� �όӅf(xi��)�hͨ�^MAC�l(f��)�ͺͽ��Ք�(sh��)��(j��)�IJ�����Ҫ�����C(j��)�ӿ�ģ�K��(n��i)�ăɂ�(g��)�(du��)�Ё��M(j��n)�й������@�ɂ�(g��)�(du��)�����ڌ�(du��)�ȴ��l(f��)�͵Ķ���(g��)���ͽ��յ��Ķ���(g��)���M(j��n)�����(du��)���l(f��)���(du��)����Ҫӛ䛵ȴ��l(f��)�͵Ď������P(gu��n)��Ϣ���l(f��)��ԓ���r(sh��)��(du��)MAC���O(sh��)���Լ�ԓ���l(f��)����֮��a(ch��n)���Ġ�B(t��i)��Ϣ���������P(gu��n)��Ϣ���������L(zh��ng)�ȡ������ⲿ�惦(ch��)���еĵ�ַ��ԓ���Ƿ��(zh��n)��ðl(f��)���Լ��(du��)�����Ƿ�߀���������ȴ��l(f��)�ͣ���(du��)MAC���O(sh��)�Ät�����Д�ʹ�ܡ����ʹ�ܡ�CRCʹ�ܣ��a(ch��n)���Ġ�B(t��i)��Ϣ�����ɹ��l(f��)��֮ǰ����ԇ�Δ�(sh��)�������_(d��)����ԇ���ƶ��ŗ��l(f��)�͡��l(f��)�͕r(sh��)�a(ch��n)���Ĝ���_ͻ�Լ��ɹ��l(f��)��֮ǰ�l(f��)���^�����t�� �����(du��)����Ҫ��(du��)���յ��Ĕ�(sh��)��(j��)���M(j��n)�����(du��)��ӛ�ÿ��(g��)���յ��Ď���Ϣ���@Щ��Ϣ���������L(zh��ng)�ȡ��ǿ��Ǝ�߀����ͨ��(sh��)��(j��)�������а����oЧ��̖(h��o)�����յ��Ď�̫�L(zh��ng)��̫�̡��l(f��)��CRC�e(cu��)�`�����յ��^���аl(f��)������_ͻ�����Ƿ�����ꡢ�(du��)�����Ƿ�߀�������ѽ��յ��Ď��Լ����惦(ch��)���ⲿ�惦(ch��)���еĵ�ַ�ȡ�ͬ�r(sh��)�(du��)����߀��ᘌ�(du��)ÿ��(g��)�����O(sh��)��λ���Á��O(sh��)���Ƿ��ڽ��յ����r(sh��)�a(ch��n)���Дࡣ�l(f��)���(du��)�кͽ����(du��)�е��L(zh��ng)�ȶ������ڿ��ƼĴ������M(j��n)���O(sh��)�á� 10.4.3 Xilinx ǧ����̫�W(w��ng)MAC IP Core 1��GMAC IP Core�đ�(y��ng)�È�(ch��ng)���ͼܘ�(g��u) Xilinx�ṩ�����B(t��i)��̫�W(w��ng)MAC��������IP Core���Ɍ�(sh��)�F(xi��n)�Ηl��������̫�W(w��ng)�·��ͨ�^���Q�C(j��)��·�������c������̫�W(w��ng)�˿����B������MAC�����������ʺܸߣ��ӂ�ݔ�����هRocket I/O���ڿ͑���߀��Ҫ����FIFO�����Q��(sh��)��(j��)�����������O(sh��)Ӌ(j��)������D10-35��ʾ�� �D10-35 ǧ����̫�W(w��ng)MACIP Core�đ�(y��ng)�È�(ch��ng)��ʾ��D 2��GMAC IP Core�����ý���ͽӿ���̖(h��o) ǧ����̫�W(w��ng)MACIP Core�����ý�����D10-36��ʾ��GEMAC����������(sh��)�F(xi��n)����Ҫ������D10-37��ʾ�������l(f��)�����桢�������桢�����ơ�GMII�ӿڡ��͑��l(f��)�ͽӿڡ��͑����սӿ��Լ��͑������ӿڡ� �D10-36 ǧ����̫�W(w��ng)MACIP Core�����ý��� �D10-37 ǧ����̫�W(w��ng)MACIP Core����Ҫ����ʾ��D ����o������(y��ng)ģ�K�Ĺ��ܺͽӿ���̖(h��o)�f���� 1���l(f��)������ �l(f��)������ͨ�^�͑��l(f��)�Ͷ˿ڽ�����̫�W(w��ng)�Ĕ�(sh��)��(j��)�������ڎ��^���ӎ�����(d��o)�^(q��)�������ڎ��L(zh��ng)С�����Ҫ��r(sh��)������һ����������ء�ͬ�r(sh��)��ԓģ�K߀��(hu��)���B�m(x��)�Ĕ�(sh��)��(j��)��֮�g������̫�W(w��ng)�f(xi��)�h��Ҏ(gu��)������С�ӕr(sh��)�����Ñ���(sh��)��(j��)�D(zhu��n)���ɘ�(bi��o)��(zh��n)��GMII��(sh��)��(j��)����������GMIIģ�K���ڑ�(y��ng)�Õr(sh��)�������Ñ��IJ������nj��Ñ���(sh��)��(j��)�x��GEMAC�˃�(n��i)�� ԓģ�K�ӿ���̖(h��o)�ĺ�(ji��n)Ҫ��Ϣ���10-10���С� ��10-10 �l(f��)������ӿ���̖(h��o)�б� �l(f��)������ĕr(sh��)����D10-38��ʾ����(d��ng)�͑����Д�(sh��)��(j��)�l(f��)�͕r(sh��)����tx_data_valid���ߣ�ͬ�r(sh��)����(sh��)��(j��)�ĵ�һ��(g��)�ֹ�(ji��)����tx_data�˿ڣ���(d��ng)GEMAC����һ�ֹ�(ji��)��(sh��)��(j��)�x���(hu��)��tx_ack��̖(h��o)���ߣ��Ñ���߉�z�y(c��)��tx_ack��ߕr(sh��)��Ҫ����һ��(g��)�r(sh��)������،�����Ĕ�(sh��)��(j��)�l(f��)�͵���(sh��)��(j��)�˿��ϣ���(d��ng)��(sh��)��(j��)�l(f��)���ꮅ��x_data_valid���͡� �D10-38 �l(f��)������ĕr(sh��)��D 2���������� ����������Ձ���GMIIģ�K�Ĕ�(sh��)��(j��)��ȥ���^������(d��o)�^(q��)�����������ӎ��L(zh��ng)��������ء����⣬ԓģ�K߀�ܸ���(j��)��(sh��)��(j��)���еęz�(y��n)���Ѕ^(q��)���յ���GMII�e(cu��)�`�a���Լ����L(zh��ng)��Ϣ����e(cu��)�`�z�y(c��)����Ҫ�ӿ���̖(h��o)�ĺ�(ji��n)Ҫ�f�����10-11���С� ��10-11 ��������ӿ���̖(h��o)�б� ��������ĕr(sh��)����D10-39��ʾ���͑���߉������κΕr(sh��)��(zh��n)��ý��Ք�(sh��)��(j��)����?y��n)���GEMAC���Л]�н��վ��棬�Еr(sh��)�Ӿ͕�(hu��)�Gʧ��(sh��)��(j��)������Ñ����Լ����Ӿ��_߉��rx_data_valid��ߕr(sh��)�����_ʼ�����B�m(x��)��(sh��)��(j��)���ڙz�y(c��)��rx_data_valid׃�ͺ��Д�rx_good_frame��̖(h��o)���ƽ�������߄t�^�m(x��)̎��ԓ����(sh��)��(j��)����tֱ�ӁG���� �D10-39 ��������ĕr(sh��)��D 3�������� ������ģ�K�Ǹ���(j��)IEEE 802.3-2002��(bi��o)��(zh��n)��31�(xi��ng)�l���O(sh��)Ӌ(j��)�ģ��ڰl(f��)�͕r(sh��)������ͣ�������Օr(sh��)Ҳ��Ҫ��(du��)��̎������GEMAC���У������Ԅ�(d��ng)���õģ�ͬ�r(sh��)��Ҳ�ṩ���Ñ��Զ��x�����ö˿ڣ����10-12���С� ��10-12 �����ƽӿ���̖(h��o) 4�����x�Ĺ����ӿ� �����ӿ���һ��(g��)��(d��)���Ŀ��x�˿ڣ����ַ����(sh��)��(j��)�Ϳ�����̖(h��o)����(du��)������ģ�K�Ǫ�(d��)���ģ��ṩ�˺�CoreConnec�����Ľ����������ɒ���MicroBlazeܛ�˻�PowerPCӲ��̎����������������GEMAC���Լ�ͨ�^MDIO�ӿ�ֱ���x���ⲿPHYоƬ�ă�(n��i)�����üĴ�����ԓģ�K�����Ñ������Ľӿں�MDIO�ӿڃɲ��֣�����ֱ���cPHYоƬ���B��ȫ���ӿ���̖(h��o)�ĺ�(ji��n)Ҫ�f����10-13���С� ��10-13 ����ģ�K�Ľӿ���̖(h��o) 5����(f��)λ���� ����ģ�K�߂��Լ���(d��)����ܛ����(f��)λ��̖(h��o)������(d��ng)�����ӿ�ģ�K����·����������(y��ng)��������̖(h��o)������configuraTIon_vector[64:0]ݔ����̖(h��o)ʹ�á����⣬GEMAC���ṩ��Ӳ����(f��)λ��̖(h��o)�����10-14���С� ��10-14 ��(f��)λ��̖(h��o)�б� 6��GMIIģ�K GMIIģ�K�Ľ�����̖(h��o)һ�㶼��ֱ���B��PHYоƬ�ϣ�ؓ(f��)؟(z��)��PHYоƬ�Ĕ�(sh��)��(j��)����������̖(h��o)��PHYоƬ�Ľӿ���һһ��(du��)��(y��ng)�ģ����10-15���С� ��10-15 GMIIģ�K�ӿ���̖(h��o)�б� ������ɺ��ڹ��̹���^(q��)�x��GEMAC�ˣ����^�̹���^(q��)���c(di��n)����View HDL Instantiation Template������鿴���������a�����ڴ��a�е�����������һ��IP Core�ķ�����һ�ӵġ� 10.5 ����С�Y(ji��) ���ٴ��Ђ�ݔ���g(sh��)��FPGAδ��������(y��ng)���I(l��ng)��֮һ��������Ҫ��B��Xilinx��˾��Rocket I/O��Q���������Ƚo�����ق�ݔ?sh��)ı�����ָ�����з�ʽ�Ǽ������Լ����������·�ı�Ȼ�x����Σ��o���˼����ش��Ђ�ݔ?sh��)�ͨ�üܘ?g��u)�����������䁉|���������c(di��n)��B��Xilinx��˾Rocket I/O��ϵ�y(t��ng)�M�ɡ����P(gu��n)�f(xi��)�h���r(sh��)��O(sh��)Ӌ(j��)�������_�l(f��)Ҫ���Լ�Rocket I/O��ʹ�÷���������f����ǧ����̫�W(w��ng)MAC������IP Core��ʹ�÷������x����Ҫע�����Rocket I/O��Xilinx�߶�FPGA�еă�(n��i)Ƕ�M������DCM��Ӳ�˳˷������KRAM�ȵ�ʹ�÷�����һ�ӵģ���ͨ�^IP Core�{(di��o)�á����ق�ݔ��һ�N�¼��g(sh��)���_�l(f��)�y���^����ֻ�ǽ�B�����е���Ҫ���IJ��ֺͻ���ԭ����߀��Ҫ�x����x�������īI(xi��n)�͌�(sh��)�H���������쾚�_�l(f��)���P(gu��n)ϵ�y(t��ng)�� |