|
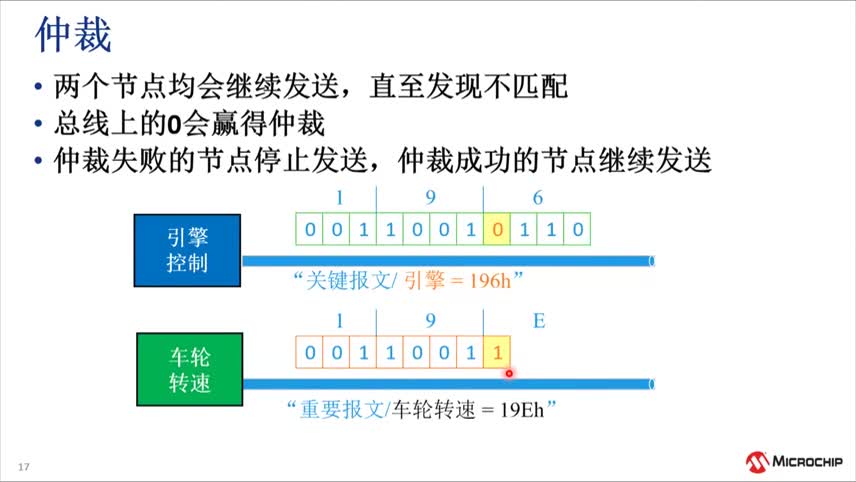
���� CAN������һ�N��Ч֧�ֲַ�ʽ���ƺ͌��r���Ƶġ������Į�������ͨ�žW(w��ng)�j(lu��)������CAN���������^���ļm�e������֧�ֲ���հl(f��)���m�ϸ����h(hu��n)���������^�h(yu��n)�Ă�ݔ���x������Philips��Intel���댧(d��o)�w��˾����֧��CANͨ�Ņf(xi��)�h�ļ���������CAN�����ѽ�(j��ng)�ڸ����I(l��ng)���еõ��ˏV����(y��ng)�á� ��CANͨ�Ņf(xi��)�h��Ҏ(gu��)����ͨ�Ų����ʡ�ÿ��λ���ڵ�ȡ��λ�ú͂���(sh��)�������������O(sh��)�����@�ӵ��O(sh��)Ӌ������Ñ����Լ��đ�(y��ng)���У���(y��u)���W(w��ng)�j(lu��)ͨӍ�����ṩ�˿��g������ͨ�^�O(sh��)��λ���r����(sh��)�탞(y��u)���W(w��ng)�j(lu��)ͨ�����ܣ�������λ���r����(sh��)�c�����r��`���ϵ�y(t��ng)��(n��i)��̖���t���P(gu��n)ϵ�����λ���ڃ�(n��i)��ȡ��λ��ƫ���܉������^�����̖��ݔ���t������(y��ng)�ģ�������ݔ���x�������L����������ڃ�(n��i)��ȡ��λ�ýӽ����g���t��������ϵ�y(t��ng)�Ĺ�(ji��)�c�g�ą����r��`����@�@Ȼ��ì�ܵģ����˅f(xi��)�{(di��o)�@�Nì�ܣ���회�λ���r����(sh��)�M�Ѓ�(y��u)��λ�á� �D1 λ���ڽY(ji��)��(g��u)�D ͨ�^��CAN����λ���r����(sh��)�M���о����ҵ�ì�ܵ��P(gu��n)�I���ڣ����܉�?q��)����M�Ѓ�(y��u)�����Ķ����ͨ��ϵ�y(t��ng)�����w���ܡ�������Philips��˾�Ī���ͨ�ſ����� SJA1000�������M���о��� 1 ���P(gu��n)���x 1.1 λ���ڵĽM�� �����ʣ�fbit����ָ��λ�r�g��(n��i)����ݔ?sh��)Ĕ?sh��)��(j��)λ�Ĕ�(sh��)����һ��ȡ��λ�r�g��1s����������ͨ�ž��ς�ݔ?sh��)�һ����(sh��)��(j��)λ���ڵ��L�ȣ�Tbit���Q��������ʽ��ʾ�� Fbit=1/Tbit ��1�� ����(j��)Philips��˾�Ī���ͨ�ſ�������һ��λ������3�����ֽM�ɣ�ͬ���Σ�tSYNC_SEG������λ���_��1��tTSEG1������λ���_��2��tTSEG2���� Tbit=tSYNC_SEG+tTSEG1+tTSEG2 (2) �����@Щ�r�g�Σ�����һ����ͬ�ĕr�g��Ԫ����ϵ�y(t��ng)�r����ڣ�TSCL�������w��SJA1000��TSCL�ɿ����r��Ĵ�����ֵ���_���� SJA1000��2�������r��Ĵ������������r��Ĵ���0��BTR0���Ϳ����r��Ĵ���1��BTR1�����@2���Ĵ������Լ���ͬ�Ĺ��ܶ��x����ͬ���ÛQ��������ͨ�Ų����ʡ� �����r��Ĵ���0 ���x�������A(y��)�O(sh��)ֵBRP����6λ��ȡֵ�^(q��)�g[1,64]��ͬ�����D(zhu��n)����SJW����2λ��ȡֵ�^(q��)�g[1,4]����ֵ��λ�����f�����1���С� ��1
CAN��ϵ�y(t��ng)�r�����TSCL��������BRP�Ĕ�(sh��)ֵ��Q����Ӌ�㹫ʽ���£� TSCL=2TCLK��BRP=2TCLK��(32BRP.5+16BRP.4+ 8BRP.3+4BRP.2+2BRP.1+1BRP.0+1) ��3�� ����TCLK�酢���r�g�����ڡ� TCLK=1/fCLK ��4�� �����a����ͬ�����������ĕr���ʎ��֮�g����λƫ�ƣ��κο�������������ڮ�(d��ng)ǰ���͵����P(gu��n)��̖߅������ͬ����ͬ�����D(zhu��n)���ȶ��x��ÿһλ���ڿ��Ա�����ͬ���s�̻����L�ĕr����ڵ����(sh��)Ŀ�� tSJW=TSCL����2��SJW.1+1��SJW.0+1�� ��5�� �����r��Ĵ���1 ���xÿ��λ�����L�Ȳɘ��c��λ�ú���ÿ���ɘ��c�IJɘӔ�(sh��)Ŀ��λ�����f�����2���У�����SAM���xҊ��3�� ��2
��3
TSEG1����4λ��ȡֵ�^(q��)�g[1,16]����TSEG2����3λ��ȡֵ�^(q��)�g[1,8]���Q����ÿһλ�r犔�(sh��)Ŀ�Ͳɘ��c��λ�á��@�� tSYNC_SEG=1��TSCL���˕r�g�ι̶��� ��6�� tTSEG1=TSCL��(8��TSEG1.3+4��TSEG1.2+2��TSEG1.1+1��TESG1.0+1) (7) tTSEG2=TSCL��(4��TSEG2.2+2��TSEG2.1+1��TESG2.0+1) (8) λ���ڵĘ�(bi��o)��ֵ��NBT�����x�飬SYNC_SEG��ͬ����ϵ�y(t��ng)�r����ڔ�(sh��)����TSEG1����λ���_��1ϵ�y(t��ng)�r����ڔ�(sh��)����TSEG2����λ���_��2ϵ�y(t��ng)�r����ڔ�(sh��)��֮�͡��@�Q��������ȡֵ�^(q��)�g��[3,25]����1��ȡ���c�r����Сֵһ��ȡ4����3��ȡ���c�r����Сֵһ��ȡ5�� NBT=Tbit/TSCL=SYNC_SEG+TSEG1+TSEG2 (9) λ���ڵ�һ��Y(ji��)��(g��u)��D1��ʾ�� 
1.2 �����r��`�� ��ϵ�y(t��ng)�У�ÿһ����(ji��)�c�����Լ������ą����r犡��������칤ˇ���\�Еr�g���h(hu��n)���ضȵ�׃�����@Щ�r犵Č��H�l������ƫ�x�A(y��)�ڵ��l��ֵ���҂��Q�@�Nƫ��酢���r��`���f����FCLK,max/min��ʾ�����r��l�ʵ����ֵ����Сֵ��fCLK,rat��ʾ�����r��l�ʵ��~��ֵ�� ����(y��ng)��ϵ�y(t��ng)�r�����Ҳ�����`�TSCL,min��ʾϵ�y(t��ng)�r�������Сֵ��TSCL,max��ʾϵ�y(t��ng)�r��������ֵ��TSCL,rat��ʾϵ�y(t��ng)�r������~��ֵ�����ڦ�f<<1�������M�н��ơ� TSCL��min=(TSCL,rat)/(1+��f)��TSCL,rat��(1-��f) ��11�� TSCL��max=(TSCL,rat)/(1-��f)��TSCL��rat��(1+��f) (12) 1.3 ��ݔ���t CAN�������ßo�Ɖ��ԵĻ��ڃ�(y��u)�ș�(qu��n)���ٲÙC�ơ����@�N�C���£���ݔ���t���P(gu��n)��Ҫ�������ݔ���t�r�g�^�L������(d��o)�oЧ���L���ٲá���ݔ���t�r�g�����������ӕr��tBUS���������(q��)�����ӕr��ttran���������O(sh��)���ݔ���t��toth����ͬ�Q���������O(sh��)�����ͨ�ſ����������x����ȡ� tprop=2��(tBUS+ttran+toth) ��ݔ���t�Ę�(bi��o)��ֵ��PROP�������ɹ�ʽ��14���õ��� PROP=tprop/TSCL (14) 1.4 ͬ�� ͨ�^ͬ���C�ƣ���������������λ�`�����Ӱ푣����C��Ϣ���_��a���ЃɷNͬ����ʽ��Ӳͬ������ͬ���� Ӳͬ���H�l(f��)���ڈ����_ʼ�r����һ�����e���g�������ϵ����п�������һ��SYNC_SEG�Ώ��[��λ���@��λ����׃���ϣ���ʼ���Լ���λ���ڶ��r����(zh��)��һ��Ӳͬ���� ��ͬ���l(f��)���ڈ���λ���l(f��)�����g��ÿһ���[��λ���@��λ��׃�غ���ͬ������(j��)����ͬ��߅�ص���λ�`�Ҫô����tTSEG1��Ҫô�p�� tTSEG2��ʹ�ɘ��c̎��ǡ��(d��ng)?sh��)�λ�á�ͬ��߅�ص���λ�`e����������ͬ��߅�ص�λ�ö�������ϵ�y(t��ng)�r����ڣ�TSCL��������������ͬ��̎����ʽ���£� e=0��ͬ��߅�ذl(f��)����SYNC_SEG��(n��i)�� e>0��ͬ��߅�ذl(f��)����TSEG1��(n��i)�� e<0��ͬ��߅�ذl(f��)����TSEG2��(n��i)�� ���������ͬ����߅����λ�`��e�ķ�ֵС�ڻ����tSJW���̔�(sh��)ֵ���t��ͬ����(d��o)��λ�r�g�s�̻����L���cӲͬ��������һ�ӣ����e����ֵ���ҷ�ֵ����tSJW���t����tTSEG1ֵ��tSJW�����e��ؓ(f��)ֵ���ҷ�ֵ����tSJW���t�p��ֵ��tSJW�� 2 ����(sh��)Ӌ��Ҏ(gu��)�t ����(sh��)�_��ԭ�t�飺���Cϵ�y(t��ng)�ژO�ː��ӗl���ăɹ�(ji��)�c�g���܉����_���ղ���a�W(w��ng)�j(lu��)�ϵ���Ϣ�����O�ː��ӗl����ָ�@�ɂ���(ji��)�c�����ƫ����ϵ�y(t��ng)����ƫ��O�ăɶˣ����҃ɹ�(ji��)�c�g�������Ă�ݔ���t���ڛ]�������ɔ_������ͨ����r�£���λ�`����Ӌ�������r�ǣ���ͬ��߅��֮�g�g����10��λ���ڡ��@�Ƕ��x SJW��Сֵ�ėl���� �ڌ��H��ͨ��ϵ�y(t��ng)�У������ɔ_�Dz��ɱ���ġ����������ɔ_�����ܕ���(d��o)����ͬ��߅��֮�g���g�����^10��λ���ڣ������M���e�`̎��ģʽ�����@�N��r�£�����ͬ��߅��֮�g�ĕr�g���^�L�����Ա��Cÿһλ���܉�_�е�ȡ�Ӿ�����Ҫ��������܉�_�е�ȡ�ӣ�������(d��o)�z�y���e�`���M���e�`̎���� ���]�������Ӱ푣�λ���r����(sh��)���O(sh��)�ù�ʽ���£� ��1ȡ���cģʽ
��3ȡ���cģʽ
��Ӌ��SJWmin�r��ȡ����Ӌ�㔵(sh��)ֵ����С����(sh��)����Ӌ��TSEG2max�r��ȡС��Ӌ�㔵(sh��)ֵ���������(sh��)���ɹ�ʽ��15������18����Ҋ��SJW�� TSEG2��NBF����f��PROP�քe�Q����Ӌ��õ�SJW��TSEG2���ɹ�ʽ��9�����Եõ�TSEG1������(j��)SJA1000�ļĴ����f�������Եõ����w�Ĵ������O(sh��)�Ô�(sh��)ֵ�� 3 ����(sh��)Ӌ�㲽�E���e�� ijCANͨ��ϵ�y(t��ng)������1��ȡ���cģʽ����������(sh��)ָ��(bi��o)���4���С� ��4
�ٴ_�����ܵ�BRP��NBT��PROP�� �ɹ�ʽ��1������3������4������9���õ� NBT=1/(fbit��TSCL)=fCLK/(2fbit��BRP) ������ NBT��BRP=fCLK/2fbit ��19�� ������(sh��)���빫ʽ��19���õ�NBT��BRP��ֵ��48����NBTȡֵ��3��25������NBT��BRP���п��ܵĽM�����5���С� ��5
��Ӌ��NBTmin��NBTmax���ɹ�ʽ��15-1������18-1������19������14������3���Ƴ� NBT��
��ʽ��22��
���딵(sh��)��(j��)��Ӌ��õ�8.31��NBT��17.9��ԭ�t���x12��16�����ԣ����˷���ȡ�Ø��c���҂�?n��i)��^���ֵ16�� �۸���(j��)��ʽ��15-1��Ӌ��SJWmin�����6���С� �ܸ���(j��)��ʽ��17-1��Ӌ��TSEG2min�����6���С� �ݸ���(j��)��ʽ��18-1��Ӌ��TSEG2max�����6���С� �_���Ĵ����O(sh��)�Ô�(sh��)ֵ�����7���С� ��6
��7
4 �Y(ji��)Փ �ڲ�ͬ��ϵ�y(t��ng)��(y��ng)���У����Ը���(j��)��ʹ�õĕr��l�ʡ��r���̖���l��ƫ�ͨ�Ų����ʼ�����ݔ���x�����أ���ͨ�ſ�����λ���r����(sh��)�M�Ѓ�(y��u)���_�����_���õ��ą���(sh��)�������ͨ��ϵ�y(t��ng)���w���ܣ��@ʹCAN������(y��u)�ݸ������@�����m�ϸ��ӏV���đ�(y��ng)�á� �����īI(xi��n) 1. PHILIPS ��˾ Determination of Bit TimingParameters for the CAN Controller SJA1000 1997 2. Philips��˾ DATA SHEET SJA1000 Stand-alone CANController 2000 3. �w���� CAN ����ԭ���͑�(y��ng)��ϵ�y(t��ng)�O(sh��)Ӌ 1996 �� �ߣ�����ȫ·ͨ����̖�о��O(sh��)ӋԺ ���� �� Դ����Ƭ�C�cǶ��ʽϵ�y(t��ng)��(y��ng)��2003��10�� |