|
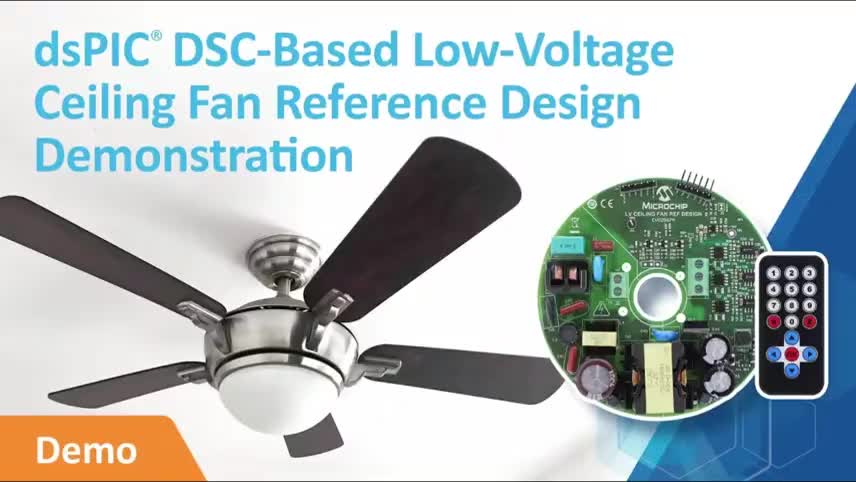
1 E2PROM��B���䑪(y��ng)�ìF(xi��n)�� E2PROM(Electically Erasable Programmable Read-Only Memory)����늿ɲ���ֻ�x�惦(ch��)��������һ�N����Ƿ�Դ惦(ch��)������늺�(sh��)��(j��)��Ȼ����(һ��ɱ����L(zh��ng)�_(d��)100��)���x��(xi��)��늘O�ͣ�����(xi��)�r(sh��)ֻ������(y��ng)�����̖(h��o)���ɣ����Ʒ�ʽ��(ji��n)�Σ��w�eС�ɡ��r(ji��)����ˣ����V����(y��ng)���ڌ�(du��)��(sh��)��(j��)�惦(ch��)��ȫ�Լ��ɿ���Ҫ���^�ߵĈ�(ch��ng)�ϣ�����IC�������ܼ�늡����I(y��)�x���x���ȡ� ��E2PROMʹ�É������ޣ�һ���ɲ���(xi��)100�f(w��n)�Σ���ijһλ��1��(xi��)��0����0��(xi��)��1�ĴΔ�(sh��)��100�f(w��n)�Ρ�һ���ϵ�y(t��ng)����ֻ��(du��)����ͬ����Ԫ�M(j��n)���l�����x��(xi��)������������@Щ��Ԫ�ēp�ġ������õ�E2PROM�惦(ch��)ϵ�y(t��ng)��ֻҪijһ��(g��)�惦(ch��)��Ԫ�p�ģ���ʹ�����^�ֆ�Ԫ������õģ�Ҳֻ�܌�����(g��)E2PROMоƬ��(b��o)�U���@���nj�(du��)�YԴ�����M(f��i)��Ҳ��ϵ�y(t��ng)�����\(y��n)�еĝ����L(f��ng)�U(xi��n)�� �������L(zh��ng)E2PROMоƬ�ĉ�������ߴ惦(ch��)ϵ�y(t��ng)�Ŀɿ��ԣ��������һ�N�^�ɿ���E2PROM�������](m��i)Ӌ(j��)����������FPGA����VHDL�M(j��n)���ˌ�(sh��)�F(xi��n)�� 2 ����E2PROM�������Ĺ���ԭ�� �ںܶ��I(l��ng)��Ĵ惦(ch��)ϵ�y(t��ng)�У��ɿ��Ԍ�(du��)ϵ�y(t��ng)��ȫ���P(gu��n)��Ҫ�����˱���ϵ�y(t��ng)���e(cu��)�������L(zh��ng)ϵ�y(t��ng)�ĉ������������m��(d��ng)�����惦(ch��)Ч�ʵ�ǰ���£����ؿ��]��ߴ惦(ch��)ϵ�y(t��ng)�Ŀɿ��ԡ� E2PROM�惦(ch��)���惦(ch��)��Ԫ�ēp����Ҫ�����l���Č�(xi��)������ɵġ���Ҫ��Q��(w��n)�}������ˣ���⌦(du��)ͬһ��Ԫ�M(j��n)���l���IJ���(xi��)�����ʹ惦(ch��)��Ԫ�p�ĵĿ��ܣ���ή�(d��ng)ijЩ��Ԫ�p�ĕr(sh��)���x��(xi��)��������(y��ng)ԓ�܉����^(gu��)�@Щ�p�ĵĆ�Ԫ�����Cϵ�y(t��ng)���^�m(x��)���������������O(sh��)Ӌ(j��)��E2PROM�����������@�ɂ�(g��)����Ĺ��ܡ� ���ĵ��O(sh��)Ӌ(j��)˼���ǣ�������(g��)EzpROM��ַ���g���֞��ַ�����^(q��)�����Å^(q��)�͔�(sh��)��(j��)�^(q��)����D1��ʾ�� 
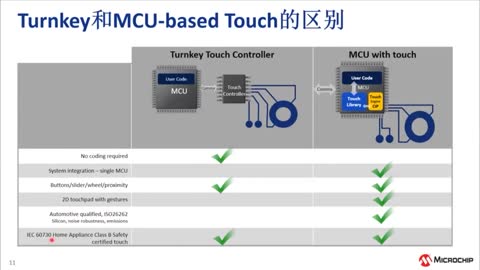
�D1 E2PROM��ַ���g���� �ڵ�ַ�����^(q��)��ֻ�惦(ch��)���Д�(sh��)��(j��)�^(q��)����Å^(q��)�惦(ch��)��Ԫ�ĵ�ַ����ʼ�r(sh��)�c��(sh��)��(j��)�^(q��)��ÿ��(g��)�惦(ch��)��Ԫһһ��(du��)��(y��ng)����(d��ng)ij��(g��)��(sh��)��(j��)���ڵĆ�Ԫ�p�ĕr(sh��)(�����l���x��(xi��)���ǔ�(sh��)��(j��)���ڵĆ�Ԫ���������ȿ��]�@�N��r)���t���Â��Å^(q��)ij��Ԫ(ͨ�^(gu��)�Č�(xi��)��(du��)��(y��ng)�Ĕ�(sh��)��(j��)������Ԫ�惦(ch��)�ĵ�ַ��ʹ��ָ����õĂ��Å^(q��)ij��Ԫ��(l��i)��(sh��)�F(xi��n))���Ժ�ÿ���x��(xi��)��ָ���µĴ惦(ch��)��Ԫ���@�Ӿ����^(gu��)�˓p�ĵĆ�Ԫ����Ҫ���⌦(du��)��ͬ��Ԫ�l������(xi��)���tÿ�^(gu��)һ�κ��m�ĕr(sh��)�g��(du��)����(g��)��(sh��)��(j��)������M(j��n)�и��£���?q��)�����(g��)E2PROM���g�����֣��Д�ij�惦(ch��)��Ԫ�Ƿ�p�ĵķ����ǣ���(du��)ԓ��Ԫ�M(j��n)�Ќ�(xi��)����֮�����̻��x�����x��(xi��)��(n��i)��һ�tԓ��Ԫ��������t�ѓp�ģ����Å^(q��)����ַ�惦(ch��)ԓ�^(q��)��δʹ�ò��ֵ��_(k��i)ʼ��ַ���Է��㔵(sh��)��(j��)��Ԫ�p�ĕr(sh��)ʹ��ԓ��Ԫ��ÿ��(d��ng)�Д�(sh��)��(j��)��Ԫ�p�ĺ�ʹ����ԓ��Ԫ�����Å^(q��)��ַ�tָ����һ��Ԫ�� �@�ӣ�E2PROM�б��攵(sh��)��(j��)�^(q��)��ēp�Ć�Ԫ���ܱ����^(gu��)��ֻ�б����ַ�ĵ�ַ������͂��Å^(q��)��ַ��Ԫ�ēp�Č�(du��)ϵ�y(t��ng)�������\(y��n)����������Ӱ푡������Å^(q��)��ַ��Ԫ�Č�(xi��)�l������ߵģ����攵(sh��)��(j��)�Ć�Ԫÿ���F(xi��n)һ��(g��)�p�Ć�Ԫ��Ҫ��(du��)��Č�(xi��)һ�Ρ���ˣ���Փ�Ϯ�(d��ng)��100�f(w��n)��(g��)��Ԫ(1MB)��?q��)������p�ĕr(sh��)�����Å^(q��)��ַ��Ԫ�ĉ���Ҳ���ıM����Ŀǰ�^���õ�E2PROMоƬ���������Ҳ������MB��������F(xi��n)��100�f(w��n)��(g��)�p�Ć�Ԫ��оƬ���ё�(y��ng)ԓ��(b��o)�U�����ԣ���Փ��ԓ���������ɿ��� 3 ϵ�y(t��ng)���w�O(sh��)Ӌ(j��) ����E2PROM�惦(ch��)оƬ�x��ATMEL��˾��AT24C01��F(xi��n)PGAоƬ����Altera��˾��CycIone IIϵ�С� ϵ�y(t��ng)�Ŀ��w��D��D1��ʾ��ϵ�y(t��ng)��Ҫ�֞�FPGA���ֺ�E2PROM���֡�FPGA������������̖(h��o)����(sh��)��(j��)���r(sh��)犵���̖(h��o)������(du��)E2PROM�M(j��n)�п��ơ�E2PROM����(j��)FPGA�Ŀ�����̖(h��o)�M(j��n)������(y��ng)���x��(xi��)������ AT24C01��(n��i)����(sh��)��(j��)��Ԫ�M����ʽ��128x8λ������֞������֣�ǰ48x8λ�����ַ�����^(q��)����ַ����0000000��0101111�����g32x8λ������Å^(q��)����ַ������0110000��1001111����48x8λ�锵(sh��)��(j��)�^(q��)����ַ������1010000��1111111����ַ���g�����f(shu��)����D2��ʾ�� ���ĵ�E2PROM��������FPGA����VHDL�Z(y��)���M(j��n)���O(sh��)Ӌ(j��)�������ޠ�B(t��i)�C(j��)���g(sh��)��(sh��)�F(xi��n)��
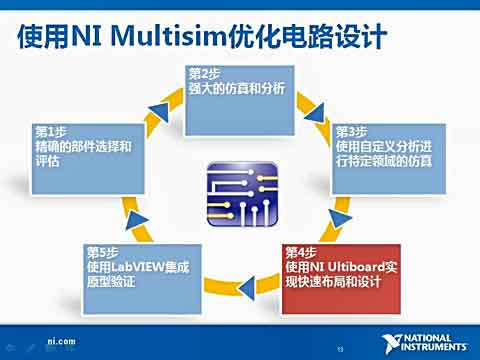
�D2ϵ�y(t��ng)���w�Y(ji��)��(g��u) 4 AT24C01 E2PROM�x��(xi��)����ԭ�� 4��1 I2C��������ԭ�� AT24C01���ú�(ji��n)�ε��p��ɾ����п���PC������(bi��o)��(zh��n)��I2c�����ɔ�(sh��)��(j��)��SDA�͕r(sh��)犾�SCL��(g��u)�ɣ��ɰl(f��)�ͺͽ��Ք�(sh��)��(j��)���䔵(sh��)��(j��)��ݔ�^(gu��)���й����ķN���������̖(h��o)�� (1)�_(k��i)ʼ��̖(h��o)����(d��ng)SCL����ƽ�r(sh��)SDA�ɸ��ƽ����ƽ��׃���������͔�(sh��)��(j��)�_(k��i)ʼ�� (2)�Y(ji��)����̖(h��o)����(d��ng)SCL����ƽ�r(sh��)SDA�ɵ��ƽ����ƽ��׃���������͔�(sh��)��(j��)�Y(ji��)���� (3)��(sh��)��(j��)��̖(h��o)����SDA���ς�ݔ?sh��)Ĕ?sh��)��(j��)����(d��ng)SCL����ƽ�r(sh��)��Ч�������S��׃����(d��ng)SCL����ƽ�o(w��)Ч�����S��׃�� (4)��(y��ng)����̖(h��o)�����ն����_���յ�8λ��(sh��)��(j��)����l(f��)�Ͷ˰l(f��)���ض��ĵ��ƽ�}�_����ʾ���յ���(sh��)��(j��)�� 4��2�ɾ�E2PROM�ֹ�(ji��)�x��(xi��)����ԭ�� �ɾ�E2PROM�Č�(xi��)������ʽ�֞��ֹ�(ji��)��(xi��)�Ͱ��(y��)��(xi��)���x������ʽ�֞��ֹ�(ji��)�x������x�����ăHʹ������������x��(xi��)��ʽ�����ֹ�(ji��)��(xi��)���ֹ�(ji��)�x��ʽ�����f(shu��)���O(sh��)Ӌ(j��)�^(gu��)�̣������x��(xi��)��ʽ���O(sh��)Ӌ(j��)�^(gu��)���c�����ơ� (1)E2PROM���ֹ�(ji��)��(xi��)�������ڿ�������(du��)E2PROM�l(f��)�͆���(d��ng)��̖(h��o)֮�o�����l(f��)��һ��(g��)8λ�Č�(xi��)�����֡������ֵĽM�ɰ���4λ12C�����a(E2PROMһ��顰1010��)��3λоƬ��ַ�a(��ƬE2PROM�顰000��)�Լ�1λ�x��(xi��)��B(t��i)λ(�x�����顮1������(xi��)�����顮0��)�� E2PROM���_���յ���(xi��)�����ֺl(f��)��lλ���ƽ�đ�(y��ng)����̖(h��o)���������o�����l(f��)��E2PROM�惦(ch��)��Ԫ��ַ��Ҫ��(xi��)��Ĕ�(sh��)��(j��)��E2PROMÿ��ֹ�_�ؽ��յ�һ��(g��)�ֹ�(ji��)�Ĕ�(sh��)��(j��)��Ҫ�l(f��)��һ��(g��)��(y��ng)����̖(h��o)���ؽo���������S��������l(f��)��ֹͣ��̖(h��o)����(du��)E2PROM��(xi��)һ��(g��)�ֹ�(ji��)�IJ�����ɡ� (2)E2PROM���ֹ�(ji��)�x������E2PROM���x����������(xi��)��ַ���x��(sh��)��(j��)�ɂ�(g��)�A�Ρ����������Ȱl(f��)��һ��(g��)����(d��ng)��̖(h��o)��8λ�Č�(xi��)�����ֹ�(ji��)(�xЩ��B(t��i)λR/W=��0��)��E2PROM���_���յ������ֺ�l(f��)��1λ���ƽ�đ�(y��ng)����̖(h��o)��֮��������l(f��)��8λ��E2PROM��ַ��ͨ�^(gu��)��(xi��)�����O(sh��)��E2PROM�惦(ch��)��Ԫ��ַ�������������ٰl(f��)��һ��(g��)����(d��ng)��̖(h��o)���x�����ֹ�(ji��)(�˕r(sh��)R/W=��1��)������(d��ng)�x������E2PROM�յ���Ϣ��l(f��)��1λ�ĵ��ƽ��(y��ng)����̖(h��o)��Ȼ��ָ����Ԫ�Ĕ�(sh��)��(j��)�l(f��)�͵�SDA���ϣ����������_�յ���(sh��)��(j��)��һ��(g��)���ƽ�đ�(y��ng)����̖(h��o)�oE2PROM���S��l(f��)��ֹͣ��̖(h��o)���ֹ�(ji��)�x�����Y(ji��)���� 5 �ɿ���E2PROM�������O(sh��)Ӌ(j��) ������VHDL�Z(y��)�ԣ������ޠ�B(t��i)�C(j��)�ķ�ʽ�ڌ�(sh��)�F(xi��n)FPGA��(du��)E2PROM�Ŀ��ơ���(du��)��һ����x��(xi��)�^(gu��)�̣�ֻ��Ҫ7��(g��)������B(t��i)��Ɍ�(sh��)�F(xi��n)���������e���_(k��i)ʼ����(xi��)�����֣���(xi��)��ַ����(xi��)��(sh��)��(j��)���x��(sh��)��(j��)��ֹͣ�� �����ڱ��ĵ��x��(xi��)�^(gu��)���^���(f��)�s���mȻ�����Ġ�B(t��i)�Ԟ��@7��(g��)��������H���@7�N��B(t��i)����(hu��)ʹ�ó������̮������s�����]��ÿ���x��(xi��)�ж�����Ҫ�ĵ�ַ��������x����(sh��)��(j��)��ַ��Ȼ����ڔ�(sh��)��(j��)��ַ�x��(xi��)��(sh��)��(j��)���@�ɂ�(g��)�A���mȻ�^(gu��)�����������B(t��i)�D(zhu��n)�Q�l����ͬ�����������x�_(k��i)��(l��i)��ʹ?f��n)�B(t��i)�D(zhu��n)�Q�ͳ������̸����������Ա�ϵ�y(t��ng)��(du��)�@�ɂ�(g��)�A�εĠ�B(t��i)���_(k��i)��(sh��)�F(xi��n)����14��(g��)��B(t��i)��(sh��)�F(xi��n)����(g��)�x��(xi��)�^(gu��)�̣�����S0���e��S1�_(k��i)ʼ��S2������(��(xi��)����)��s3��(xi��)��ַ��s4�_(k��i)ʼ��S5������(�x����)��S6�x��(sh��)��(j��)(�ĵ�ַ��������xȡ��(sh��)��(j��)��ַ)��S7�Y(ji��)��(����Y(ji��)�����˺�锵(sh��)��(j��)�x��(xi��)�^(gu��)��)��S8�_(k��i)ʼ��S9��(xi��)�����֣�S10��(xi��)��ַ��Sll��(xi��)��(sh��)��(j��)��S12�x��(sh��)��(j��)��S13ֹͣ������Sl��S7����ַ��������^(gu��)�̣�S8��S13���M(j��n)�Д�(sh��)��(j��)�x��(xi��)���^(gu��)�̡�����(g��)�^(gu��)�̵Ġ�B(t��i)�D(zhu��n)�Q�^(gu��)����D3��ʾ�� �����O(sh��)Ӌ(j��)��E2PROM���õķ�����Ҫ���Ȍ�(du��)E2PROMоƬ�M(j��n)�и�ʽ��������(du��)����(g��)E2PROM�惦(ch��)���g�M(j��n)�Є��֣�������ַ��������@��(g��)�^(gu��)�̞������(xi��)������ѭ�h(hu��n)������Ƕ��ϵ�y(t��ng)�x��(xi��)�^(gu��)���С� ��ˣ�����(g��)ϵ�y(t��ng)����3��(g��)��Ҫ�M(j��n)�̣��r(sh��)犮a(ch��n)���M(j��n)�̣���B(t��i)�D(zhu��n)�Q�M(j��n)�̺͠�B(t��i)�����M(j��n)�̡� 1���r(sh��)犮a(ch��n)���M(j��n)�̣�ؓ(f��)؟(z��)�a(ch��n)���M��ϵ�y(t��ng)����ĸ��N�r(sh��)犣���Ҫ��E2PROM��SCL�����Ҟ��˷��㷽�㰴�Օr(sh��)�Ҫ���x��(xi��)��(sh��)��(j��)����SCL���ڃ�(n��i)���֞�4��(g��)�����ڡ�������1��8V��2��5V��2��7v�r(sh��)��E2PROM�Ĺ����l�ʞ�100KHz�����IJ���100M���� ������a(ch��n)���ⲿ�r(sh��)�clk���t���M(j��n)��1000���l��(l��i)�a(ch��n)��E2PROM�����SCL�r(sh��)���̖(h��o)��ԓ�M(j��n)�����£� CLK_GEN��PROCESS(clk) BEGIN IF clk��EVENT AND clk=��1��THEN IF ncount=499 THEN ncount<=0��sclsig<=NOT sclsig�� ELSE ncount<=ncount+l�� END IF�� END IF�� sel<=selsig�� END PROCESS�� 2����B(t��i)�D(zhu��n)�Q�M(j��n)�̣�ؓ(f��)؟(z��)���m��(d��ng)?sh��)ĕr(sh��)�C(j��)����B(t��i)�C(j��)�D(zhu��n)����һ��B(t��i)�����a���£� STATE_TRANS��PROCESS(sclsig) BEGIN IF sclsig��EVENT AND sclsig=��0��THEN curstate<=nextstate�� END IF�� END PROCESS 3����B(t��i)�����M(j��n)�̣�ؓ(f��)؟(z��)�ڸ�ʽ�����x��(xi��)�^(gu��)���и��N��̖(h��o)���O(sh��)�ã��@������(g��)ϵ�y(t��ng)���(f��)�sҲ������ĵIJ��֣��䱾�|(zh��)����ϵ�y(t��ng)��B(t��i)�D(zhu��n)�Q�D��VHDL���a��(sh��)�F(xi��n)�������^(gu��)���ஔ(d��ng)���������@��ֻ�܌��@��(g��)�M(j��n)�̴��a����Ҫ����չʾ����(l��i)��Ȼ��(du��)����B(t��i)�ľ��w�����M(j��n)���m��(d��ng)?sh��)��f(shu��)���� ���M(j��n)�̵���Ҫ���a���£� STATE_CTR��PROCESS(clk) BEGIN IF clk��EVENT AND clk=��1��THEN CASE curstate IS WHEN S0=> IF rwf/="00" THEN nextstate<=S1�� END IF; ...... WHEN S13=> IF sclsig=O AND ncount=499 THEN sda<=��0���� ELSIF sclsig=1 AND nclk=124 THEN sda<=��1����nextstate<=sO�� END IF�� END CASE�� END IF�� END PROCESS��
�D3ϵ�y(t��ng)��B(t��i)�D(zhu��n)�Q�D ��(du��)����B(t��i)���f(shu��)�����£� S0�����e��B(t��i)���z�y(c��)rwf��̖(h��o)ݔ�롣������ʽ������(��l(f��)l��)�t�D(zhu��n)��S8��������x������?q��)��������?�քe�顰0l���͡�10��)�t�D(zhu��n)��S1�� S1���a(ch��n)���_(k��i)ʼ��̖(h��o)����ɺ��D(zhu��n)����S2�� S2����SDA��ݔ����(xi��)���������֡���ɺ��D(zhu��n)��S3�� S3����(xi��)��ַ(���ⲿݔ��)������������Ĕ�(sh��)��(j��)��Ԫ��(du��)��(y��ng)�ڵ�ַ������еĵ�ַ����ɺ��D(zhu��n)��S4�� S4���a(ch��n)���_(k��i)ʼ��̖(h��o)����ɺ��D(zhu��n)��S5�� S5����SDA���x���������֡���ɺ��D(zhu��n)��S6�� S6���xȡ��(sh��)��(j��)����̎�����蔵(sh��)��(j��)���ڵĵ�ַ����ɺ��D(zhu��n)��s7�� S7���a(ch��n)���Y(ji��)����̖(h��o)����ɺ��D(zhu��n)��S8�����˲���^(gu��)�̽Y(ji��)�����˺�錍(sh��)�H�x��(xi��)�^(gu��)�̡� s8���a(ch��n)���_(k��i)ʼ��̖(h��o)����ɺ��D(zhu��n)��S9�� S9��ݔ�������֡�������x�����^(gu��)�����Ҟ�ڶ����M(j��n)��ԓ��B(t��i)���t��SDA��ݔ���x���������֣���ɺ��D(zhu��n)��S12����tݔ����(xi��)���������֣���ɺ��D(zhu��n)��S1O�� S1O����(xi��)��ַ(��S6��B(t��i)���xȡ�Ĕ�(sh��)��(j��))����ɺ�������x�����t�D(zhu��n)��S11����t�D(zhu��n)��S8�� S11����(xi��)��(sh��)��(j��)����SDA����(xi��)�ⲿ�ṩ�Ĕ�(sh��)��(j��)����ɺ��D(zhu��n)��S13�� S12���x��(sh��)��(j��)����ɺ��D(zhu��n)��S13�� S13���a(ch��n)���Y(ji��)����̖(h��o)�����̎���x�����Y(ji��)����B(t��i)���t�D(zhu��n)��SO�����̎�ڌ�(xi��)�����Y(ji��)����B(t��i)���қ](m��i)�Ќ�(du��)��(sh��)��(j��)���x�ԙz������(xi��)��Ԫ�Ƿ��������t�D(zhu��n)��S6�M(j��n)�л��x�����̎�ڌ�(xi��)�������x�Y(ji��)����B(t��i)���o(w��)�`�t�D(zhu��n)��S0�����`�t�D(zhu��n)��S1�x���Å^(q��)��ַ������nj�(du��)���Å^(q��)��(xi��)�������x���`���t��ַ��l���M(j��n)��S6��(xi��)��һ��ַ��ֱ�������_��(xi��)�룬֮��ַ��1��(xi��)����Å^(q��)��ַ��Ȼ���D(zhu��n)��S0�����̎�ڸ�ʽ���^(gu��)���У��t��ַ��1���D(zhu��n)��S8��ֱ����ʽ���Y(ji��)���D(zhu��n)��S0�� 6 �����Y(ji��)���ͽY(ji��)Փ
�D4��(xi��)�������ܷ���IJ��ֲ���
�D5�x�������ܷ���IJ��ֲ��� ��Quartos IIܛ���Ќ�(du��)�����O(sh��)Ӌ(j��)��E2PROM�������M(j��n)���˹��ܷ��档��(xi��)�������x�������ܷ���IJ��ֲ�����D4�͈D5��ʾ������(j��)���沨�ο�֪����Y(ji��)���c�A(y��)�ڻ���һ�¡��ڹ����еijɹ���(y��ng)��Ҳ�C���˱��O(sh��)Ӌ(j��)�����_�ԡ� �������߄�(chu��ng)���c(di��n)����(du��)E2PROM�惦(ch��)���g�M(j��n)���m��(d��ng)?sh��)Ą��֣������ָᘵķ�ʽ�M(j��n)���x��(xi��)�������p����ϵ�y(t��ng)��(du��)�ض��惦(ch��)��Ԫ����ه�������ϵ�y(t��ng)�Ŀɿ��ԡ� ���ߣ����x����ĠN ��(l��i)Դ����Ӌ(j��)��C(j��)��Ϣ��(Ƕ��ʽ�cSOC)2009���7-2�� |