|
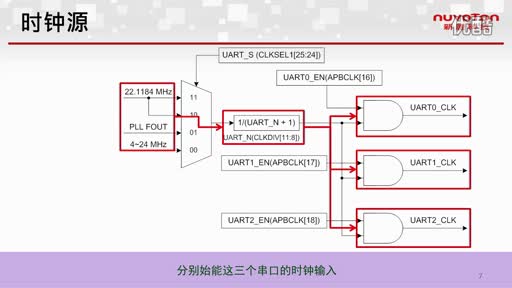
���ߣ�jobs ��������UART���ڣ�������Ƭ�C(j��)��õ�ͨӍ�ӿ��ѽ�(j��ng)����ÿһ��(g��)Ƕ��ʽ���̎����X����UART�����������Ρ���(sh��)�õ����ԣ�Ƕ��ʽ���̎������Á팢�������{(di��o)ԇϵ�y(t��ng)����Ҫ���ߡ�UART���ڵ����Å���(sh��)�кܶ࣬������ã�����Ҫ�ĵą���(sh��)ֻ��ͨӍ���������@һ��(g��)�������@�H�е�һ��(g��)����(sh��)�ֳ����o�҂������S�����_����ô���҂����ڴ��ڲ�������ԓ����R�e��?�P�����@���B���N�R�e�������ʵķ���������҅����� ����UART(Universal Asynchronous serial Receiver and Transmitter)�������н���/�l(f��)�ͽӿڣ���Ƕ��ʽϵ�y(t��ng)�������Ҫ�Ľӿ�֮һ�������H���ڰ弉оƬ֮�g��ͨӍ�����ґ�(y��ng)���ڌ�(sh��)�F(xi��n)ϵ�y(t��ng)֮�g��ͨ�ź�ϵ�y(t��ng)�{(di��o)���С�UART���鮐������ͨ�Ņf(xi��)�h��һ�N������ԭ���nj���ݔ��(sh��)��(j��)��ÿ��(g��)�ַ�һλ��һλ��ݔ�����ַ���(sh��)��(j��)����ʽ���D��ʾ�� 
�����D1 UART�ַ���(sh��)��(j��)����ʽ ����������D�еĎ���ʽ���Կ�����UART��(sh��)��(j��)����1��(g��)�_ʼͬ��λ��1��(g��)��(sh��)��(j��)�֣�1��(g��)�Y(ji��)��ֹͣλ���Լ����x��У�(y��n)λ�M�ɡ�����UART�鮐��ͨӍ����ˣ��䰴λ�l(f��)�͕r(sh��)��횇�(y��n)�������O(sh��)���IJ����ʣ������շ�Ҳ�������ͬ�IJ������²������_�����l(f��)�͵��ַ���(sh��)��(j��)�����ǣ����շ����_�R�e�����ò����ʾ��ஔ(d��ng)�P(gu��n)�I�ˡ�����P�߸���(j��)��(sh��)�H��(j��ng)�(y��n)��B���N�R�e���ڲ����ʵķ����� �����F�e�� ������Փ�ϣ��l(f��)�Ͳ����ʿ����O(sh��)���������ֵ������ƽ�r(sh��)�҂�ʹ�õĴ�������ֻ���@ô�N��(sh��)ֵ����D2��ʾ��
�D2 ���ô��ڲ������� ������Ȼ֪���˳��ô������ʣ������҂��Ϳ���һ��(g��)һ��(g��)ԇ������(hu��)��һ��(g��)�dzɹ�����(d��ng)Ȼǰ�����҂�֪�����C(j��)�l(f��)�͵ă�(n��i)����ʲô����t��β���֪�������������_ƥ����!�@����ע�⣬���O(sh��)���������c��(sh��)�H�����ʳɱ���(sh��)����r�£��ǿ����x���픵(sh��)��(j��)������(d��ng)Ȼ����(sh��)��(j��)���e(cu��)�`�ġ� ����ʾ������ ����ʾ���������������̎��ġ��۾������҂����Ծ����@�p�۾��������������ڰl(f��)�͔�(sh��)��(j��)�IJ����ʡ��@���҂����ų����߶˵Ď��Д�(sh��)��߉�������ܵ�ʾ��������?y��n)飬�@�ӵ�ʾ�����ѽ�(j��ng)�h(yu��n)���P�ߵ�IQ�ˣ������҂���ƪӑՓ�ă�(n��i)�ݡ� ������һ���֣��҂��v���˲��εĎ���ʽ���@���҂������ò��Σ��l(f��)��һ��(g��)������ַ�0x55(1010 1010B)������Փ����������@��(g��)���Α�(y��ng)ԓ��(hu��)�a(ch��n)��һ��(g��)��λ���D(zhu��n)�IJ���Ч�����D3�ǹP��ʹ��ʾ�����ɼ����Ľ؈D��
�����D3 9600bps�l(f��)��0x55���ΈD ���������D3��ʾ�IJ��ΈD���ټ�����Փ�������҂�֪�������ǰ�λ���D(zhu��n)�������҂�ʹ��ʾ������ָᘹ���(cursor)��ֱ�Ӳ鿴�����ʡ���D3���ϽǵĜy���Y(ji��)���@ʾ��ÿλ���D(zhu��n)���l�ʞ�9.615KHz���c�҂��O(sh��)�����l��9600kbps������������Դ_���˰l(f��)���l�ʞ�9600bps�� оƬ���R�e�� ����UART���ڳ����Á�����̼�����ʹ�õĽӿڣ���ˣ��䲨����Ҫ����(j��)��λ�C(j��)�Č�(sh��)�H��r����������h(hu��n)���^��r(sh��)������Ҫʹ�õͲ����ʵ�ͨӍ���@�r(sh��)���Ԅ�(d��ng)�������R�e�ķ������Q���ˡ������҂���TI Stellaris��bootloader��Ĵ��ڲ������Ԅ�(d��ng)�R�eԴ����?y��n)����M(j��n)�з����� ����int UARTAutoBaud(unsigned long *pulRatio){ ����long lPulse, lValidPulses, lTemp, lTotal; ����volatile long lDelay; ����// ����systick������ֵ�O(sh��)�������ֵ; ����HWREG(NVIC_ST_RELOAD) = 0xffffffff; ����HWREG(NVIC_ST_CTRL) = NVIC_ST_CTRL_CLK_SRC | NVIC_ST_CTRL_ENABLE; ����// ���_���_��߅���|�l(f��)�Д� ����HWREG(GPIO_PORTA_BASE + GPIO_O_IBE) = UART_RX; ����// ʹ��UART RXD���_߅���|�l(f��)�Д� ����HWREG(NVIC_EN0) = 1; ����// �ɼ����_߅���Д࣬�ɂ�(g��)�ֹ�(ji��)��߅�� ����while(g_ulTickIndex < MIN_EDGE_COUNT) ����{ ����} ����// Ӌ(j��)��systick�ɘ�����ֵ��������M(j��n)��̎�� ����for(lPulse = 0; lPulse < (MIN_EDGE_COUNT - 1); lPulse++){ ����lTemp = (((long)g_pulDataBuffer[lPulse] - ����(long)g_pulDataBuffer[lPulse + 1]) & 0x00ffffff); ����g_pulDataBuffer[lPulse] = lTemp; ����} ����// ��ѭ�h(hu��n)Ӌ(j��)��ɂ�(g��)�B�m(x��)�}�_֮�g�Č��� ����for(lPulse = 0; lPulse < (MIN_EDGE_COUNT - 1); lPulse++){ ����// ���_Ӌ(j��)��ɂ�(g��)�B�m(x��)�}�_֮�g�Č��� ����lTemp = (long)g_pulDataBuffer[lPulse]; ����lTemp -= (long)g_pulDataBuffer[lPulse + 1]; ����if(lTemp < 0) { ����lTemp *= -1; ����} ����// �(y��n)�C�ɂ�(g��)߅�ص��}���Ƿ����_�����㷨���£� ����// abs(Pulse[n] - Pulse[n + 1]) < Pulse[n + 1] / PULSE_DETECTION_MULT ����// ���� ����// PULSE_DETECTION_MULT * abs(Pulse[n] - Pulse[n + 1]) < Pulse[n + 1] ����if((lTemp * PULSE_DETECTION_MULT) < (long)g_pulDataBuffer[lPulse + 1]) { ����lTotal += (long)g_pulDataBuffer[lPulse]; ����lValidPulses++; ����} ����else{ ����lValidPulses = 0; ����lTotal = 0; ����} ����// 7��(g��)��Ч�}�_���Ϳ���Ӌ(j��)��UART�������� ����if(lValidPulses == 7) { ����// �����һ��(g��)�}�_����Ӌ(j��)��(sh��)������Ӌ(j��)�㲨���� ����lTotal += (long)g_pulDataBuffer[lPulse]; ����*pulRatio = lTotal >> 1; ����// ���سɹ���(bi��o)�R ����return(0); ����} ����} ����// �z�yʧ�� ����return(-1); ����} ����UART���������@�ӻ����ǘӵă�(y��u)�c(di��n)�������d��USB�ӿڵ�USB DFU���ܿ��Ը�����Ч������ځ���ɹ̼�����;���܃�(y��u)Խ��CAN��������Ӳ���r(ji��)���½�������CAN������MAC�ӿڸ��༯��������MCUоƬ��;CAN2.0B�ӿ����ڔD����UART�ӿ��������Ј�;�����҂���ͨ���F(xi��n)������̖��X�ѽ�(j��ng)�]��DB9���������ښ���ĬF(xi��n)��(sh��)�£������Ҳ�Sֻ���҂���ӹ��̎��ŕ�(hu��)ӛ������(j��ng)�ĺ��Ρ���(sh��)�õ�UART���ڡ� |