|
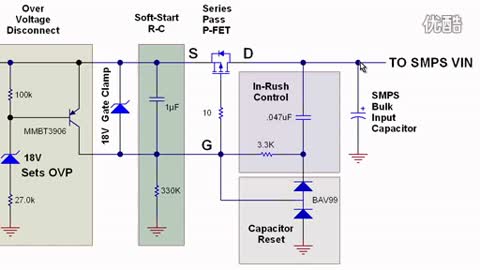
90 年代出現的鋰電池是能源技術領域的一個重要的里程碑。和其它二次電池相比, 鋰電池具有更高的體積密度和能量密度, 因此在移動電話、個人數字助理(Personal D igital A ssistan t, PDA )、計算機等手提式電子設備中獲得了極為廣泛的應用。 一方面, 以鋰電池為供電電源的電路設計中, 要求將越來越復雜的混合信號系統集成到一個小面積芯片上, 這必然給數字、模擬電路提出了低壓、低功耗問題。在功耗和功能的制約中, 如何取得最佳的設計方案也是當前功耗管理技術( Pow erM anagem en t, PM ) 的一個研究熱點。目前研究得較多的是系統級的動態功耗管理技術(Dynam icPow erM anagem en t, DPM ) , 它的基本思想是關掉不工作的部分以節省系統功耗, 但是在大多數情況下, 這種方法僅用于數字系統的低功耗優化。和模擬電路相關的低功耗設計也有許多文獻報道, 但基本只限于某類專用電路, 而對數模混合電路的功耗管理則少有文獻涉及。 另一方面, 鋰電池的應用也極大地推動了相應電池管理、電池保護電路的設計開發。鋰電池應用時必須要有復雜的控制電路, 來有效防止電池的過充電、過放電和過電流狀態。 本文針對鋰電池保護電路, 在考慮功能實現的同時, 重點從功耗的角度出發, 采用了模擬電路中關鍵電路工作在亞閾值區的設計思路, 并利用內部數字信號反饋控制模擬電路進入Standby 狀態, 從而滿足較低電壓下的功耗管理。 系統功能實現 圖1 給出了鋰電池保護電路的系統框圖。圖中,VDD 和V SS 分別是電池電源和地輸入端; CO 和DO 分別是充電及放電控制端, 在正常工作模式下均為高電平, 電池既可以充電又可以放電, 反之, 充電和放電回路被切斷;VM 是放電過流、充電過流檢測端。電路實現的功能如下: (1) 過充電、過放電檢測: 圖中的取樣電路(SAM PL E) 將實時監測電池電壓信號, 并將之送入過充電比較器(OV ERCHARGE)、過放電比較器(OV ERD ISCHARGE) 和基準電壓比較, 判斷電池電壓是否高于過充電檢測電壓或是否低于過放電檢測電壓, 再由數字邏輯控制電路(CON TROLLO G IC) 輸出相應信號到CO 端及DO 端, 即完成過充電、過放電檢測功能。 (2) 放電過流檢測: 由VM 端來監測電池接負載放電時的電流大小, 和不同的基準電壓比較后, 由三個比較器: 過流1 (OV ERCU RREN T1)、過流2(OV ERCU RREN T2)、負載短路(LOAD SHORTDETECT ION ) 輸出相應信號, 并根據過流程度經過相應延時后, 由邏輯控制電路輸出信號控制DO 端。 (3) 充電過流檢測: VM 端信號還可以反映電池接充電器時, 充電電流的大小, 再經充電檢測比較器(CHARGE DETECT ION ) 比較后, 由邏輯控制電路決定是否應停止充電。 (4) 零伏電池充電功能: 由電平轉換電路(CONV ERTOR) 實現, 能夠對待充電的電池進行檢測, 若電池電壓低于零伏電池充電電壓, 便輸出信號將CO 端置為低電平, 從而切斷充電回路。 可以看出, 此電路是一個連續工作的數模混合系統, 同時又以被監測的鋰電池為供電電源, 在實現電路功能并滿足檢測精度的前提下, 電路的功耗成了另外一個重要的性能指標。由于控制邏輯部分屬于數字電路, 靜態功耗幾乎可以忽略, 所以如何降低模擬電路的靜態功耗并且限制低電壓下的電路功耗成了設計重點。 系統低功耗設計 Standby 狀態實現 設計中, 為了使電路在電池過放電情況下盡可能地降低電流消耗, 數字電路中加入了使系統進入Standby 狀態的控制部分, 原理圖由圖2 給出。 圖中信號OD 由數字電路產生, 當比較器檢測到電池電壓低于過放電檢測電壓, 并經過延時后,OD 將從高電平變為低電平, 此時通過P2 管將VM拉到高電平, 再經反相后從負載短路輸出OU T_ L S端輸出低電平, 使輸出端STAND 變為低電平,STANDB 為高電平, 意味著系統可以進入Standby狀態; 一旦電池充電開始時,VM 端迅速被置為低電平, 此時不管OD 如何, 都通過OU T _L S 將STAND恢復為高電平, 系統進入正常的檢測狀態。 通過內部數字電路產生的Standby 信號, 可以有效打開或者切斷模擬電路從電源到地的直流通路, 使電路在不需要的時候保持Standby 狀態, 以降低電源消耗。因為只需要單個MO S 便可充當電路的控制開關, 所以這種方法簡單可靠, 不影響原有的模擬電路功能, 并且能和模擬電路低功耗設計相結合,實現低電壓下電路的功耗管理。 亞閾值電壓基準電路 由于電壓基準源同時要給過充比較器、過放比較器、過流1 比較器及過流2 比較器提供不隨溫度、電源電壓變化而變化的基準電壓, 所以在模擬電路中起著非常重要的作用, 同時也是影響電路功耗的一大因素。本文利用MO S 管的亞閾值特性, 設計了工作在亞閾值區的電壓基準電路, 能夠滿足上述功耗要求, 電路結構如圖3 所示。 電路利用一個自偏置電路產生具有正溫度系數的電流, 該電流流過電阻R 0 所產生的壓降和具有負溫度系數的PN 結壓降相加, 可以輸出一個零溫度系數的基準電壓V BD; 為滿足同一電路中輸出不同的基準電壓源, 利用電阻分壓將V BD 分成了V B I1 及V B I2輸出。同時, 為保證電路在加上電源電壓后能進入正確的工作狀態, 電路中還加入了R C 啟動電路。 由圖3 可見, P0 和P1 組成電流鏡, 取相同的寬長比, 則。在P1、P0、N 0、N 1 和R 5 構成的自偏置電路中, 選擇合適的R 5 值, 可以使N 0 和N 1 工作在亞閾值區。并且, 在時, 亞閾值MO S 管的漏電流I d 可表示為: 式中, 與工藝參數有關, 其中n 為亞閾值因子, k 為波爾茲曼常數, q 為電子電荷。因為,V GSN 0- V GSN 1= IN 0?R 5,將式(1) 代入, 則有: 式(2) 中可以看出, 不考慮電阻R 1 的溫度系數,電流IN 1與熱電壓U T 成線性關系, 具有正溫度系數。P2 和P1 組成電流鏡, 假定流過P2 的電流為I P2, 則有: 設二極管正向壓降為V D , 分壓電阻R 1、R 2、R 3、R 4 對R 0 的影響可以用等效電阻R = (R 1 + R 2 ) ∥ (R 3 +R 4) 來表示, 則在正常工作時, 滿足 該電流產生電路有兩個平衡工作點, 即零點和正常工作點, 所以需要一個啟動電路, 使電路能在上電過程中脫離零點而穩定工作。另外, 從電路功耗考慮, 啟動電路在電路進入正常工作后應斷開, 沒有電流消耗。設計時從P 1 的漏端加入了R 6、C0, 構成自偏置電路的啟動電路。 與傳統的Bandgap 基準源電路相比, 該電路有以下特點: 電路工作在亞閾值區, 功耗極低, 電路中電阻值和器件參數均取比值, 最大程度地避免了工藝漂移引起的輸出變化; 電路設計中還加入了R C啟動電路, 保證電路在上電后能及時進入正常工作狀態。另外, 由內部數字信號STANDB 的控制, 此電路能夠在低電壓下進入Standby 狀態, 此時消耗電流僅由控制管的漏電流決定, 小到幾乎可以忽略。 模擬結果 電路采用UMC 0. 6 μm 數字電路SP ICE 模型進行HSP ICE 模擬驗證。圖4 給出了電路對電池電壓VDD 進入和退出過充電狀態時的模擬結果, 從圖中可看出, 過充電出現后, CO 端被置為低電平, 反之則是與電源電壓相等的高電平。 結束語 基于單片機的溫度自動控制系統工作正常, 溫度采樣和顯示的誤差控制在設計要求的±1℃之內。系統應用于DF101B 型集熱式恒溫磁力攪拌器, 主控部分和從控部分通信穩定。在AD590 的電流模擬量輸出后, 電阻分壓和放大倍數需要很好的匹配, 既要保證分辨率的大小適中, 又要確保輸入的電壓在ADC0809 轉換電壓范圍之內。無線通信過程中要求清楚數據編碼的波形, 以便調試時知道發送數值的正確與否, 以及傳輸中干擾的大小和將要采取的抗干擾的措施。專用顯示驅動芯片MAX7219 與MCS- 51 之間是用串行的方式通信, 時序的配合在通信中非常重要。 數字化已經是控制領域的發展趨勢。溫度控制系統經歷了長時間發展以后, 智能化程度的要求越來越高, 以微處理器為核心的溫度智能控制系統能夠滿足絕大多數領域對溫度控制的要求。與微處理器其它方面的應用相比, 以微處理器為核心的溫度控制系統的開發在中國來說顯得更為迫切, 很多的控制領域還在沿用傳統的控制理論, 采用老的控制系統, 適時性不強, 處理速度慢, 故障率比較高。 因此開發以單片機為核心的溫度自動控制系統具有很強的現實意義, 本系統是一套較完整的溫度自動控制系統。考慮到系統工作環境的因素和工作現場對系統的具體要求, 加強系統的抗干擾能力和工作穩定性將是系統要進一步改進的首要方面。我們可以在傳感器輸出與單片機的輸入之間加上光電隔離, 同時單片機和繼電器控制之間也加上光電隔離, 這對系統的抗干擾能力將有很大的提高。 |