|
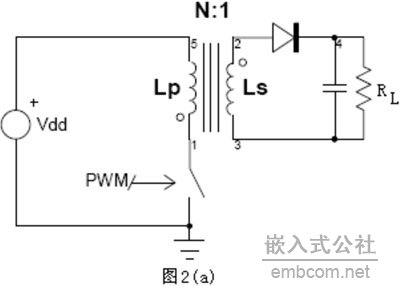
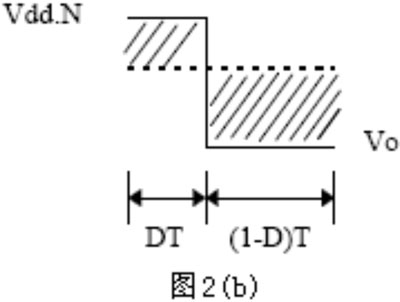
ǰ�� ����Ŀǰ��ϵ�y(t��ng)�е��_�P(gu��n)�Դ���ЃɷN��ͬ�Ĺ���ģʽ����(d��ng)�Դ̎�ڌ�(d��o)ͨ��B(t��i)�ĕr(sh��)�����ò�ͬ��ģʽ�������h(hu��n)�@���Դ����Ȧ�е����[1]��������FLYBACK��?f��)�Y(ji��)��(g��u)�����������乤 ��ԭ�������ܹ����ڃɷN��ͬ��ģʽ�����@�ɷNģʽ������ͬ�Ĺ����������t����(y��ng)�@�ɷN��ͬ�Č�(d��o)ͨģʽ����ֱ���ͽ�����r��(hu��)�зdz���IJ�e�����ҽM���Դ�� Ԫ������(hu��)�ܲ�ͬ�̶ȵ�Ӱ�[2]������(j��)������(sh��)�(y��n)�Y(ji��)���ķ��������Կ���������x��ʽ�Դϵ�y(t��ng)���������ϵ�y(t��ng)�Ŀɿ��ԣ����͌�Ԫ�����ȼ���Ҫ��һ�㶼������ ���B�m(x��)�^(q��)�� �������Č����Ƚ�B�R��ģʽ����ԭ�����ڷ����ɷNģʽ�������c(di��n)�Ļ��A(ch��)�ϣ�����R��ģʽ���Ƶĸ����ͨ�^��ͬģʽ�㡢�O�c(di��n)�ķ������ó�ᘌ�FLYBACK�Y(ji��)��(g��u)�{(di��o)���R��ģʽ�ķ�����������w�·ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����o��ģ�M�����Y(ji��)���� �R��ģʽ����ԭ�� �����D1(a)��(b)ʾ���ׂ�(g��)���ڃ�(n��i)�D(zhu��n)�Q����Ȧ�����^����IJ���ʾ��D���ĈD�п��Կ�������(d��ng)̎�ڌ�(d��o)ͨ��B(t��i)�ĕr(sh��)����늸��н��������ň���������� ����������(d��ng)�P(gu��n)���늸дň������½�������(j��)���Ɲ���ɣ���늸��н�������늄�(d��ng)�ݣ����@�N��r�£�������˱���������B�m(x��)�ԣ�����ҵ�������(y��ng)ͨ·������� ���_ʼ�pС�����磬����?f��)�Y(ji��)��(g��u)��FLYBACK����r�£�����ͨ�^ݔ���W(w��ng)�j(lu��)�S�������������BUCK��?f��)�Y(ji��)��(g��u)�£��tͨ�^�m(x��)�����O���S�������[3]�� �������������½������ڃ�(n��i)��������p����֮ǰ���·�ٴΌ�(d��o)ͨ��Ԓ����D1(a)��ʾ���Q�顰�B�m(x��)��(d��o)ͨģʽ����CCM�����������(d��ng)�P(gu��n)���r(sh��)�ڃ�(n��i)������ ��Ȧ���ܱ��^���ޣ���(d��o)���ٴ��_֮ͨǰ����ѽ�(j��ng)�����㣬��D1(b)��ʾ�����F(xi��n)��һ�Ρ����^(q��)�r(sh��)�g�����t����(y��ng)�Ĺ�����B(t��i)�Q�顰���B�m(x��)��(d��o)ͨģʽ����DCM������ �^(q��)�r(sh��)�g���L�ж̣���������·�O(sh��)�ó��@�ӵĹ�����B(t��i)�����Ǯ�(d��ng)���P(gu��n)�����g�����һ�����㣬ϵ�y(t��ng)�����_�����t����(y��ng)�����^(q��)�r(sh��)�g���㣬����(y��ng)���@�N������B(t��i)�Q�顰�R �猧(d��o)ͨģʽ���� �D1 �_�P(gu��n)�^�����ʾ��D ����Ŀǰ���������N����ʹ�·�M(j��n)���R���B(t��i)�� �������_�����R���B(t��i)����(y��ng)��늸�ֵLC�����Ǯ�(d��ng)늸�ֵLC�_�����ڲ�ͬؓ(f��)�d��r�£�ϵ�y(t��ng)�s�����M(j��n)��CCMģʽ��Ҳ�����M(j��n)��DCMģʽ�� �R��ģʽ���������O(sh��)Ӌ(j��) �����D2��ʾFLYBACK��?f��)�Y(ji��)��(g��u)���D(zhu��n)�Q����ͨ�^������Ӌ(j��)��������M(j��n)���M(j��n)һ���Ľ�ጡ� �������˺������������M(j��n)�����¼��O(sh��)[3]�� �������O(sh��)1��ÿ���ڃ�(n��i)늸�ƽ��늉�����0�� �������O(sh��)2������(j��)�D1(b)��ʾ����(d��ng)L=LC�ĕr(sh��)��IL(ƽ��)=1/2IP �������O(sh��)3���Դ���ʾ���100%���D(zhu��n)�QЧ�ʣ���Pin=Pout ��������������O(sh��)1�����Դ_������CCMģʽ�µ�ֱ��늉��D(zhu��n)�Q�ʣ�����(j��)�D2(b)���Եõ������P(gu��n)ϵʽ��
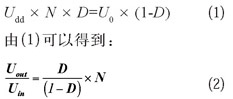
��������(j��)�D1(b)���Կ���������(y��ng)���R��ģʽ����ζ���ڌ�(d��o)ͨ��B(t��i)�У�����Ȧ�д惦��������(hu��)����(g��)�����_ʼ�ĕr(sh��)�����ý����㣬����(j��)���Д࣬�ɵ�[4]�� ��������(j��)���O(sh��)2������ʽ�e�ֿɵã�
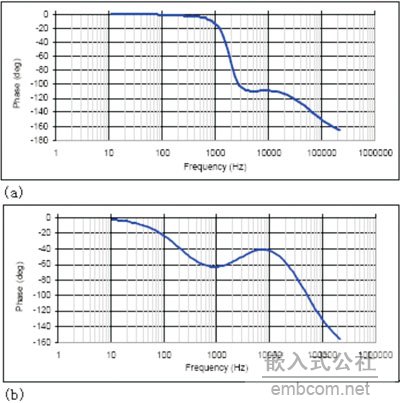
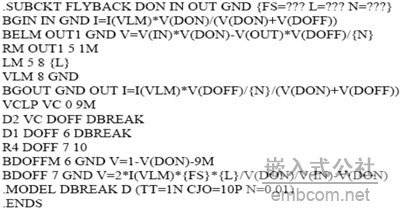
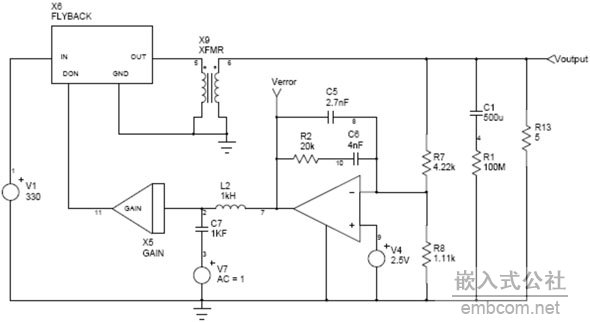
�������ϴ_����FLYBACK��?f��)�Y(ji��)��(g��u)�D(zhu��n)�Q���R��ģʽ����(y��ng)���P(gu��n)�I����(sh��)ֵ��Ҳ���Դ_�������ڱ��C�Դ��(w��n)���Ϳɿ���ǰ���£�DCMģʽ��CCMģʽ����(y��ng)�ĘO�c(di��n)�����c(di��n)Ҳ�܉�_����������1�o���˲�ͬ����ģʽ�O�c(di��n)�����c(di��n)��λ�ü�����(y��ng)��FLYBACK늉����档 ��������SPICEģ�M �D3 ����(y��ng)�D2�·��ģ�M�Y(ji��)�� ���������У�������(y��ng)�_�P(gu��n)ģ�͵ľW(w��ng)��������ʾ�� ��2
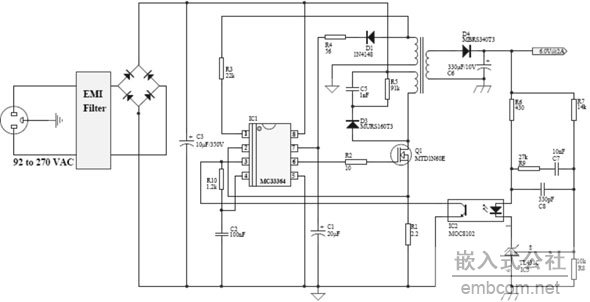
�������M(j��n)��ACģ�M�ĕr(sh��)����Ҫ���r(sh��)�����_·�����`���Ŵ������x�_��ͨ�^�a(b��)���W(w��ng)�j(lu��)���{(di��o)����ʹҪ��õ��M�㡣���ķ�������D4����ʾ����L2��C7 �M�ɵ�LC�W(w��ng)�j(lu��)�����M(j��n)�·�У��_(d��)�����x������Ŀ�ġ�늸�Ԫ���܉�S��ֱ���`��Ĵ�С���Ķ�ʹݔ���S��������Ҫ��ֵ�ϣ�ͬ�r(sh��)��AC�`����x��ࡣ���Ԫ���� ��a(ch��n)��һ��(g��)AC��̖���Ķ����S������AC���衣�������Ľ�������r(sh��)��ʹL2=1kH��C7=1kF������(d��ng)�M(j��n)��˲�B(t��i)�����ĕr(sh��)�t L2=1nH��C7=1pF�������@�N�k���܉��C�Ԅ�(d��ng)ֱ��ռ�ձ��{(di��o)�������C��(d��ng)ռ�ձȸ�׃�ĕr(sh��)���܉�����{(di��o)��ݔ������(sh��)��������(hu��)��������̖�a(ch��n)��Ӱ푡� �Y(ji��)Փ ��������ǰ���ӑՓ�������SMPS���ڷ��B�m(x��)ģʽ�������漰�a(b��)���W(w��ng)�j(lu��)���������ģ����Ҍ��·���ڷ��B�m(x��)ģʽ�܉��C��(w��n)���Ϳɿ����·������B(t��i)�� ��ô��α��C�·��DCM��B(t��i)�������cݔ���o�P(gu��n)�أ��ЃɷN�k����һ��Ӌ(j��)��LP������ͨ�^�l�ʵIJ����{(di��o)��ʹ�·�S����DCM��B(t��i)���������������O(sh��)Ӌ(j��)���R��� �B(t��i)�������܉��C�Դ�·��(d��ng)�����·������ĕr(sh��)�������_�������@�N��r�£��Ͳ��ÿ��]��ͬؓ(f��)�d��r�µIJ�ͬ�O(sh��)Ӌ(j��)�����ˣ�ֻ��Ҫ���C���O(sh��)Ӌ(j��)�Ŀ�������һֱ�� ��SMPS��DCMģʽ�¹������ɣ������ں܌���ؓ(f��)�d������(n��i)���܉�(w��n)���ɿ������� �����������O(sh��)Ӌ(j��)�{(di��o)�����ĕr(sh��)��߀��Ҫ���]������r��������d�����@�N��r�£���ԭ���O(sh��)���Ŀ��Ʒ������·�_�P(gu��n)�l�ʌ����{(di��o)�Ƶķdz��ߣ���(d��o)���˲���Ҫ�� �_�P(gu��n)�p���Լ�늴ż��ݵȆ��}�������Դ��ϵ�y(t��ng)�����r(sh��)�����d��r��(hu��)�dz���Ҋ��������Ҫ���·�O(sh��)Ӌ(j��)�н�Q�@һ���}�����·�м����l���Q������ʹ�l�ʿ��{(di��o)������ �����ں���������(n��i)�� ���������R��ģʽ���������ܵ��_�P(gu��n)�Դ�܉�?q��)��F(xi��n)400W��AC/DC�m�������{(di��o)��(ji��)�����У�©늲��ֵĿ���ͨ�^R5��C5(Ҋ�D5)�M(j��n)�п��ƣ�ͬ�r(sh��)߀���Ԍ�����늉��M(j��n)��ƽ�����ã��pС��ݗ�����Įa(ch��n)����ԭ�����·�O(sh��)Ӌ(j��)�У��������ɿع����R�{�܁���������������Ŀ����Ǜ]�����õġ� �����īI(xi��n)�� [1] R. D. MIDDLEBROOK and S. CUK, A general Unified Approach to
Modeling Switching Converter Power Stages , IEEE PESC, Vol.21, No.1,
18-34, 1976. Record, pp 18-34 Vol.35, No.8, 830-839, 2005. |