|
低噪音且高耐用性的無刷直流電機(jī)廣泛用于許多領(lǐng)域,包含工業(yè)應(yīng)用、汽車及家庭。本文說明藉由使用微控制器偵測(cè)轉(zhuǎn)子初始位置以進(jìn)行電機(jī)控制的方法,對(duì)此等電機(jī)的控制非常有幫助。此方法解決許多容易發(fā)生在無傳感器電機(jī)上的各種問題,藉由平順且快速的高扭力啟動(dòng),實(shí)現(xiàn)極致高效系統(tǒng)。 使用無刷直流電機(jī)時(shí),設(shè)計(jì)師有多種控制原則可選擇。為保持低成本,通常會(huì)省略檢測(cè)轉(zhuǎn)子位置的傳感器(無傳感器原則),而采用另一種方法,例如根據(jù)電機(jī)的反電動(dòng)勢(shì)預(yù)估位置。但此無法提供電機(jī)停止時(shí)的轉(zhuǎn)子位置信息,因此無法依據(jù)轉(zhuǎn)子位置在啟動(dòng)時(shí)控制電機(jī),故可能因啟動(dòng)時(shí)非必要的反向旋轉(zhuǎn)等情況,而導(dǎo)致效率降低。納入初始位置檢測(cè)功能即可解決此等問題(圖1)。 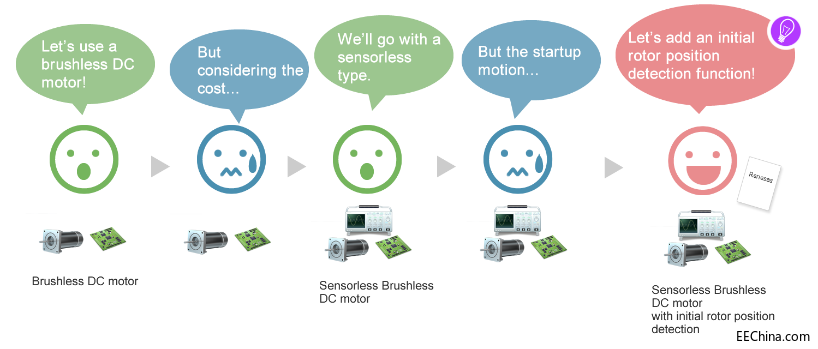
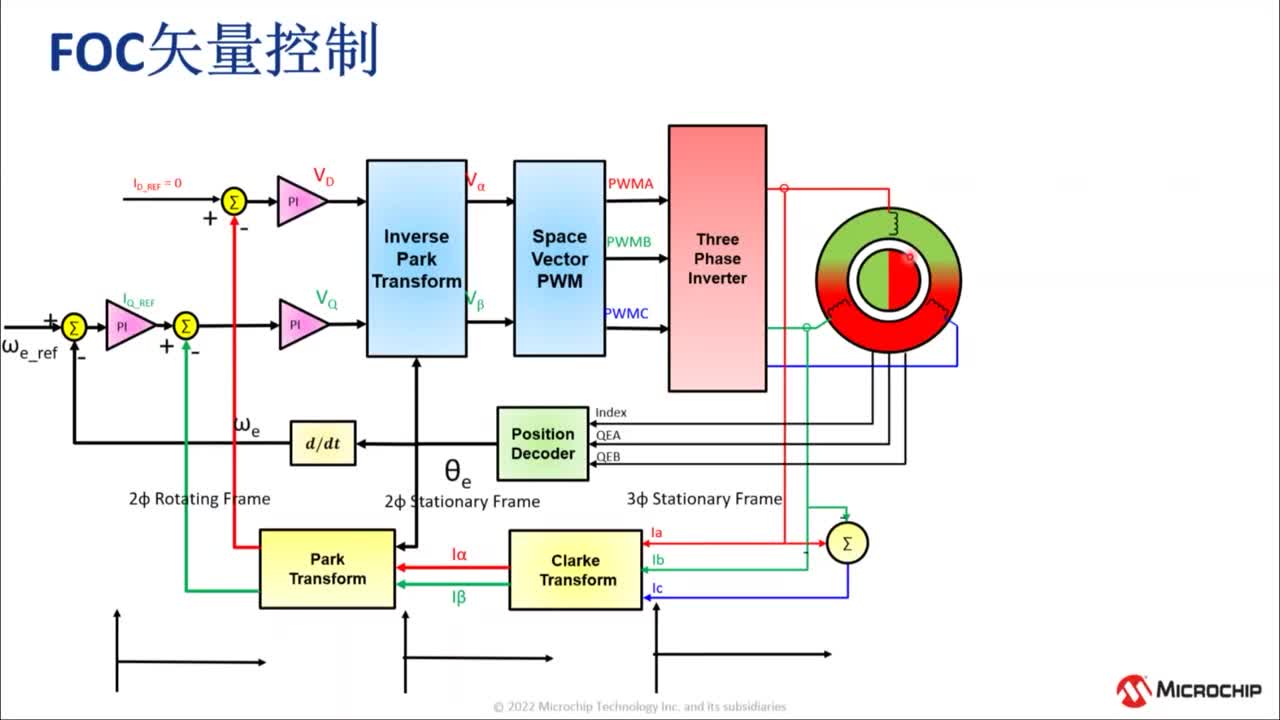
圖1、考慮無傳感器無刷直流電機(jī) 本文說明能有效控制無傳感器無刷直流電機(jī)的初始轉(zhuǎn)子位置檢測(cè),透過使用控制電機(jī)的微控制器,實(shí)現(xiàn)此初始位置檢測(cè)。藉由應(yīng)用本文所述的方法,可實(shí)現(xiàn)無傳感器、平順、快速且高扭力的啟動(dòng)。此技術(shù)對(duì)于電動(dòng)工具、輸送設(shè)備、機(jī)器人、水泵、鼓風(fēng)機(jī)等的開發(fā)非常有效。 解決容易發(fā)生在無傳感器電機(jī)上的啟動(dòng)問題 圖2說明無刷直流電機(jī)控制中初始轉(zhuǎn)子位置的定位技術(shù)。 可利用如120度傳導(dǎo)法(梯形控制)或矢量法(正弦控制)等進(jìn)行三相無刷直流電機(jī)控制。120度傳導(dǎo)法每60度切換一次三相激磁模式,在線圈的磁通量與轉(zhuǎn)子永久磁鐵之間產(chǎn)生扭力。此方法相當(dāng)易于實(shí)施,因此被廣泛使用。另一方面,矢量法將電機(jī)的電流值分成精確控制的扭力分量及磁場(chǎng)分量,因而大范圍的實(shí)現(xiàn)從低速到高速的高效率控制,但此法需要復(fù)雜的算術(shù)處理,會(huì)增加CPU的負(fù)荷。 
圖2、應(yīng)用于無刷直流電機(jī)的技術(shù) 不論是120度傳導(dǎo)法或矢量法,針對(duì)轉(zhuǎn)子位置檢測(cè)都有感測(cè)及無傳感器的解決方案。本文僅著重于120度傳導(dǎo)法。霍爾傳感器(磁性傳感器)通常用于使用120度傳導(dǎo)法的感檢測(cè)系統(tǒng),但這會(huì)增加系統(tǒng)成本,而且霍爾傳感器也有不耐熱的缺點(diǎn)。 另一方法,無傳感器系統(tǒng)依賴各種與電機(jī)旋轉(zhuǎn)有關(guān)的現(xiàn)象例如產(chǎn)生的反電動(dòng)勢(shì),以預(yù)估轉(zhuǎn)子位置。但這會(huì)阻礙電機(jī)停止時(shí)的轉(zhuǎn)子位置檢測(cè),因此無法在電機(jī)啟動(dòng)時(shí),根據(jù)轉(zhuǎn)子位置進(jìn)行正確的控制。當(dāng)應(yīng)用程序的啟動(dòng)行為沒有問題時(shí),可忽略轉(zhuǎn)子位置并執(zhí)行強(qiáng)制啟動(dòng),但在以下情況中則不適合: - 應(yīng)避免啟動(dòng)期間非必要的反向旋轉(zhuǎn), - 需要快速且平順的啟動(dòng), - 應(yīng)保持啟動(dòng)時(shí)低電流消耗。 在這些情況下,必須檢測(cè)初始轉(zhuǎn)子位置以進(jìn)行適當(dāng)控制。 整合無傳感器電機(jī)控制需要的所有功能 在詳細(xì)說明實(shí)施無傳感器初始轉(zhuǎn)子位置檢測(cè)前,本文將先就設(shè)計(jì)用于電機(jī)控制的微控制器-瑞薩RL78/G1F微控制器(以下稱G1F)做說明。本產(chǎn)品為瑞薩電子低階微控制器RL78系列的一部分(參見圖3)。此系列中,G1F屬于「一般用途」子類(G1x),且包含使RL78/G1F適合電機(jī)控制應(yīng)用的專門特性組合。RL78/G1F與電機(jī)控制應(yīng)用有關(guān)的部分功能包括: - 用于電機(jī)控制的Timer,支持64MHz芯片上振蕩器頻率, - 附DAC的高速比較器,用于參考電壓, - 高電壓轉(zhuǎn)換速率可編程增益放大器 (PGA), - A/D轉(zhuǎn)換器等。 利用G1F的周邊功能實(shí)施無傳感器120度傳導(dǎo)控制的電路配置如圖4所示。16位Timer(Timer RD)產(chǎn)生逆變器控制所需的三相補(bǔ)償PWM訊號(hào)。基于安全考慮,利用可編程增益放大器(PGA)及比較器(CMP0)檢測(cè)過電流,故可強(qiáng)制關(guān)閉PWM訊號(hào),無需CPU介入。
圖3、RL78系列規(guī)劃
圖4、無傳感器120度傳導(dǎo)控制之電路配置 利用可選擇的4輸入比較器(CMP1)及具有輸入擷取(捕獲)功能的Timer(Timer RX),檢測(cè)初始轉(zhuǎn)子位置。開始旋轉(zhuǎn)且可取得反電動(dòng)勢(shì)后,可利用通過零點(diǎn) (zero-cross) 檢測(cè),決定轉(zhuǎn)子位置。以三相中性點(diǎn)輸入為基準(zhǔn),比較器進(jìn)行通過零點(diǎn)檢測(cè)。或者亦可利用10位A/D轉(zhuǎn)器(ADC)取得數(shù)值并進(jìn)行通過零點(diǎn)檢測(cè)。使用比較器的第一種方法適合高準(zhǔn)確度及高速度操作,而使用A/D轉(zhuǎn)換器的第二種方法(無比較器)較適合中/低速應(yīng)用。 結(jié)合兩種處理步驟以縮短檢測(cè)時(shí)間 無傳感器初始轉(zhuǎn)子位置檢測(cè)包含以下兩個(gè)處理步驟。 步驟1:在180度以內(nèi)的位置檢測(cè) 步驟2:極性檢測(cè) 步驟1系以三相電機(jī)端子之間的電感會(huì)因轉(zhuǎn)子位置(變化)而有所不同的事實(shí)(參見圖8)。電感差異會(huì)影響下游端子(此例中即為MCU或示波器)的電壓上升行為,而此為檢測(cè)的基礎(chǔ)。此步驟決定磁鐵沿三個(gè)相位(U、V及W)之一的方向,但尚未決定極性(北或南),因?yàn)橄嗤淖兓瘯?huì)在整個(gè)360度電氣角度范圍內(nèi)重復(fù)兩個(gè)周期。 而步驟2采用的事實(shí)則是電機(jī)永久磁鐵產(chǎn)生的磁通量與電流通過線圈產(chǎn)生的磁通量之影響會(huì)導(dǎo)致線圈鐵芯材料磁飽和,而使電流更容易流動(dòng)。因此能識(shí)別永久磁鐵的磁極方向。結(jié)合步驟1和步驟2的結(jié)果,即可檢測(cè)整個(gè)360度范圍內(nèi)的轉(zhuǎn)子位置。 不同的電機(jī)類型會(huì)有一定的差異,但處理步驟1時(shí)的目標(biāo)電流非常小,且量測(cè)只需要幾毫秒的時(shí)間。相對(duì)而言,步驟2則要應(yīng)付相對(duì)較大的電流,且量測(cè)時(shí)間則增長約100倍。 實(shí)際上,即使只對(duì)三相執(zhí)行處理步驟2(三次),仍能以60度的分辨率檢測(cè)到轉(zhuǎn)子的初始位置。但此牽涉到較長的處理時(shí)間而且必須面對(duì)較高的電流。故本文所述之解決方案旨在藉由整合處理步驟1和2,實(shí)現(xiàn)更高的效率。 處理步驟1:藉由比較相位之間的電壓上升行為進(jìn)行評(píng)估 180度以內(nèi)的位置檢測(cè)程序說明如下。使用的G1F周邊功能配置如圖5所示。
圖5、處理步驟1電路配置(180度以內(nèi)之位置檢測(cè)) 首先,在U相上施加電源電壓,并量測(cè)V相電壓 (VUV) 達(dá)到門坎(檻)參考電壓 (VREF1) 時(shí)經(jīng)過的時(shí)間。此程序的操作原理如圖6所示。將VUV及VREF1相電壓檢測(cè)輸入傳送至比較器 (CMP1) 進(jìn)行匹配檢測(cè),并利用Timer RX的計(jì)數(shù)器值決定當(dāng)VUV與VREF1相符的時(shí)間。Timer RX開始計(jì)數(shù),與Timer RD的PWM輸出同步,并與CMP1同步捕獲計(jì)數(shù)值。
圖6、施加U → V電壓并量測(cè)達(dá)到比較參考電壓的時(shí)間 分別針對(duì)全部三個(gè)通道U → V、V → W及W → U執(zhí)行本程序,并按照以下標(biāo)準(zhǔn)決定轉(zhuǎn)子沿三個(gè)軸的位置: 若tUV > tVW 及 tWU,則轉(zhuǎn)子的磁極方向?yàn)檠豔軸方向(參見圖7)。 CMP1最多可使用四個(gè)切換外部輸入,進(jìn)行匹配比較。由于上述操作使用其中三個(gè)輸入,故可利用時(shí)間量測(cè)值達(dá)到可重復(fù)的結(jié)果。
圖7、依據(jù)U → V、V → W及W → U的量測(cè)時(shí)間檢測(cè)轉(zhuǎn)子位置 由于永久磁鐵磁場(chǎng)的效應(yīng),相應(yīng)相位端子之間的電感會(huì)隨轉(zhuǎn)子位置而改變,而此效應(yīng)的大小亦會(huì)以相同的趨勢(shì)改變Timer RX的計(jì)數(shù)值。舉例來說,假設(shè)端子間電感、轉(zhuǎn)子位置及Timer RX計(jì)數(shù)值的變化如圖8所示,則可利用產(chǎn)生的圖形決定轉(zhuǎn)子位置。以圖7為例,在圖8中,電氣角度60度及240度時(shí)會(huì)建立 tUV > tVW ≒ tWU 關(guān)系。由于此變化在整個(gè)360度范圍內(nèi)重復(fù)兩次,故在任意點(diǎn)上無法判斷兩個(gè)角度(相差180度)中的哪一個(gè)是正確的。
圖8、端子間的電感變化取決于轉(zhuǎn)子位置與Timer RX計(jì)數(shù)值 端子之間的電感及隨轉(zhuǎn)子位置之變化會(huì)因電機(jī)而有所差異。此外,輸出至CMP1的相電壓行為不僅受到電機(jī)電感的影響,亦會(huì)受到逆變器電路的影響。因此,用戶需要先依據(jù)轉(zhuǎn)子位置評(píng)估Timer RX計(jì)數(shù)值的變化并設(shè)定CMP1的比較參考電壓。 處理步驟2:比較并聯(lián)電壓行為以進(jìn)行比評(píng)估 本節(jié)說明用于極性檢測(cè)的第二個(gè)處理步驟。使用的G1F周邊功能配置如圖9所示。由于此程序以電機(jī)電流作為微控制器的輸入電壓,故需要分流電阻。此輸入可用于旋轉(zhuǎn)時(shí)的過電流檢測(cè)。
圖9、處理步驟2(極性檢測(cè))電路配置 依據(jù)處理步驟1的結(jié)果,可識(shí)別磁鐵指向方向的相位。此步驟中,在繞組+ve(一相)及–ve(兩相)之間施加特定電流,持續(xù)固定的時(shí)間 (tCONST)。 利用可編程增益放大器 (PGA) 放大該點(diǎn)(電流檢測(cè)輸入)的并聯(lián)電壓,并以A/D轉(zhuǎn)換器 (ADC) 量測(cè)。圖10上方電路(紅色訊號(hào)路徑)顯示當(dāng)電流從W流向U及V時(shí)的訊號(hào)。
圖10、W → U、V電流及U、V → W電流時(shí)的并聯(lián)電壓量測(cè) 接著,讓電流以反向流動(dòng)相同的時(shí)間 (tCONST),并進(jìn)行同樣的并聯(lián)電壓量測(cè)。圖10下方電路(藍(lán)色訊號(hào)路徑)顯示當(dāng)電流從U及V流向W時(shí)的訊號(hào)。 可利用這兩個(gè)量測(cè)值間的大小關(guān)系決定永久磁鐵的磁通量方向。在圖11的例子中,當(dāng)電流從W流向U及V時(shí)的電流值 (IW+) 大于電流反向流動(dòng)時(shí)的電流值 (IW-)。因此,可判定轉(zhuǎn)子方向?yàn)閃相磁通量增強(qiáng)的方向(電流從W到U的磁通量方向,V與永久磁鐵的磁通量方向相同)
圖11、轉(zhuǎn)子極性評(píng)估電流(并聯(lián)電壓) 依據(jù)處理步驟1和2的結(jié)果,可決定轉(zhuǎn)子初始位置。 更多信息請(qǐng)?jiān)L問瑞薩電子網(wǎng)站 瑞薩電子網(wǎng)站提供本文所述初始轉(zhuǎn)子位置檢測(cè)方法的詳細(xì)信息,包括應(yīng)用說明、程序代碼范例、示范影片等。影片提供親眼證實(shí)電機(jī)啟動(dòng)動(dòng)作如何因有/沒有初始位置檢測(cè)而改變。如需更多信息,請(qǐng)利用以下URL連結(jié)。 • 初始位置檢測(cè)示范影片:
https://www.renesas.com/promotions/solutions/event/others2017/sensor-less-bldc-motor-control.html • 應(yīng)用說明:
https://www.renesas.com/search/keyword-search.html#q=r01an3596&genre=document • 程序代碼范例: https://www.renesas.com/search/keyword-search.html#q=r01an3596&genre=sampleprogram |