|
�C(j��)��ҕ�X(ju��)ϵ�y(t��ng)�ĽM�� �C(j��)��ҕ�X(ju��)ϵ�y(t��ng)��ָ��Ӌ(j��)��C(j��)��(l��i)��(sh��)�F(xi��n)�˵�ҕ�X(ju��)���ܣ�Ҳ������Ӌ(j��)��C(j��)��(l��i)��(sh��)�F(xi��n)��(du��)���^�����S������R(sh��)�e�����F(xi��n)�ڵ����⣬���ҕ�X(ju��)ϵ�y(t��ng)�ĸ��ܲ�����ҕ�W(w��ng)Ĥ������һ��(g��)���S�ɘ�ϵ�y(t��ng)�����S���w�Ŀ�Ҋ(ji��n)����ͶӰ���W(w��ng)Ĥ�ϣ��˂�����ͶӰ��ҕ�W(w��ng)Ĥ�ϵĶ��S�����(l��i)��(du��)ԓ���w�M(j��n)�����S���⡣���^���S������ָ��(du��)���^�쌦(du��)����Π�ߴ硢�x�_(k��i)�^���c(di��n)�ľ��x���|(zh��)�غ��\(y��n)��(d��ng)������������ٶȣ��ȵ����⡣ �C(j��)��ҕ�X(ju��)ϵ�y(t��ng)��ݔ���b�ÿ����ǔz��C(j��)���D(zhu��n)�ĵȣ������������S��Ӱ������ݔ��Դ����ݔ��Ӌ(j��)��C(j��)�ľ������S���^����Ķ��SͶӰ����������S���^���絽���SͶӰ������һ�N��׃�Q��Ԓ���t�C(j��)��ҕ�X(ju��)ϵ�y(t��ng)��Ҫ�����Ǐ��@�N���SͶӰ�D�����S���^�������׃�Q��Ҳ���Ǹ���(j��)�@�N���SͶӰ�D��ȥ�ؽ����S�Ŀ��^���硣 �C(j��)��ҕ�X(ju��)ϵ�y(t��ng)��Ҫ�������ֽM�ɣ��D��ī@ȡ���D���̎���ͷ�����ݔ�����@ʾ�� ����80%�Ĺ��I(y��)ҕ�X(ju��)ϵ�y(t��ng)��Ҫ���ڙz�y(c��)���棬��������������a(ch��n)Ч�ʡ��������a(ch��n)�^(gu��)���еĮa(ch��n)Ʒ�|(zh��)�����ɼ��a(ch��n)Ʒ��(sh��)��(j��)�ȡ��a(ch��n)Ʒ�ķ���x��Ҳ�����ڙz�y(c��)�����С�����ͨ�^(gu��)һ��(g��)�������a(ch��n)���ϵĆΔz��C(j��)ҕ�X(ju��)ϵ�y(t��ng)���f(shu��)��ϵ�y(t��ng)�ĽM�ɼ����ܡ� ҕ�X(ju��)ϵ�y(t��ng)�z�y(c��)���a(ch��n)���ϵĮa(ch��n)Ʒ���Q���a(ch��n)Ʒ�Ƿ�����|(zh��)��Ҫ������(j��)�Y(ji��)�����a(ch��n)������(y��ng)����̖(h��o)ݔ����λ�C(j��)���D��@ȡ�O(sh��)�������Դ���z��C(j��)�ȣ��D��̎���O(sh��)���������(y��ng)��ܛ����Ӳ��ϵ�y(t��ng)��ݔ���O(sh��)�����c�����^(gu��)�����B�����P(gu��n)ϵ�y(t��ng)�������^(gu��)�̿������͈�(b��o)���b�õȡ���(sh��)��(j��)��ݔ?sh��)��?j��)��C(j��)���M(j��n)�з����ͮa(ch��n)Ʒ���ƣ����l(f��)�F(xi��n)���ϸ�Ʒ���t��(b��o)�����澯���������ų������a(ch��n)�����C(j��)��ҕ�X(ju��)�ĽY(ji��)����CAQϵ�y(t��ng)���|(zh��)����Ϣ��(l��i)Դ��Ҳ���Ժ�CIMS����ϵ�y(t��ng)���ɡ� �D��ī@ȡ �D��ī@ȡ��(sh��)�H���nj����y(c��)���w�Ŀ�ҕ���D��̓�(n��i)�������D(zhu��n)�Q���ܱ�Ӌ(j��)��C(j��)̎����һϵ�Д�(sh��)��(j��)������Ҫ�������ֽM�ɣ����������D��۽��γɣ��D��_�����γɔz��C(j��)ݔ����̖(h��o) 1������ ������Ӱ푙C(j��)��ҕ�X(ju��)ϵ�y(t��ng)ݔ�����Ҫ���أ���?y��n)���ֱ��Ӱ�ݔ��?sh��)��(j��)���|(zh��)��������3 0%�đ�(y��ng)��Ч�������ڛ](m��i)��ͨ�õęC(j��)��ҕ�X(ju��)�����O(sh��)�䣬����ᘌ�(du��)ÿ��(g��)�ض��đ�(y��ng)�Ì�(sh��)����Ҫ�x������(y��ng)�������b�ã����_(d��)�����Ч���� �^(gu��)ȥ���S��I(y��)�õęC(j��)��ҕ�X(ju��)ϵ�y(t��ng)�ÿ�Ҋ(ji��n)�������Դ���@��Ҫ����?y��n)���?ji��n)�����@�ã��r(ji��)��ͣ����ұ��ڲ��������õĎN��Ҋ(ji��n)��Դ�ǰß����չ����ˮ�y�����c��������ǣ��@Щ��Դ��һ��(g��)���ȱ�c(di��n)�ǹ��ܲ��ܱ��ַ�(w��n)�������չ����������ʹ�õĵ�һ��(g��)100С�r(sh��)��(n��i)�����܌��½�15%���S��ʹ�Õr(sh��)�g�����ӣ����܌������½�����ˣ����ʹ������һ���ij̶��ϱ��ַ�(w��n)�����nj�(sh��)�û��^(gu��)���м���Ҫ��Q�Ć�(w��n)�}�� ��һ��(g��)���棬�h(hu��n)���⌢��׃�@Щ��Դ���䵽���w�ϵĿ����ܣ�ʹݔ���ĈD��(sh��)��(j��)��������һ����üӷ��o(h��)���ķ������p�٭h(hu��n)�����Ӱ푡� ���ڴ���������(w��n)�}���ڬF(xi��n)��Ĺ��I(y��)��(y��ng)���У���(du��)��ijЩҪ��ߵęz�y(c��)�΄�(w��)��������X�侀�������Ȳ���Ҋ(ji��n)�������Դ�����Dz���Ҋ(ji��n)�ⲻ���ڙz�y(c��)ϵ�y(t��ng)�IJ������҃r(ji��)���^�ߣ����ԣ�Ŀǰ�ڌ�(sh��)�H��(y��ng)���У��Զ��ÿ�Ҋ(ji��n)�������Դ�� ����ϵ�y(t��ng)�������䷽���ɷ֞飺����������ǰ���������Y(ji��)��(g��u)����l�W�������ȡ����У����������DZ��y(c��)����ڹ�Դ�͔z��C(j��)֮�g�����ă�(y��u)�c(di��n)���ܫ@�øߌ�(du��)�ȶȵĈD��ǰ�������ǹ�Դ�͔z��C(j��)λ�ڱ��y(c��)���ͬ��(c��)���@�N��ʽ���ڰ��b���Y(ji��)��(g��u)�������nj���Ż�Դ��Ͷ�䵽���y(c��)���ϣ�����(j��)�����a(ch��n)���Ļ�׃�����{(di��o)�����y(c��)������S��Ϣ���l�W�������nj����l�ʵĹ��}�_���䵽���w�ϣ�����C(j��)�ĔzҪ���c��Դͬ���� 2���D��۽��γ� ���y(c��)��ĈD��ͨ�^(gu��)һ��(g��)�R�۽�������Ԫ���ϣ���ͬ����C(j��)����һ�ӡ�����ͬ��������C(j��)ʹ���z�������C(j��)��ҕ�X(ju��)ϵ�y(t��ng)ʹ����������(l��i)���D����������ҕ�D���D(zhu��n)�������̖(h��o)������Ӌ(j��)��C(j��)̎���� �xȡ�C(j��)��ҕ�X(ju��)ϵ�y(t��ng)�еĔz��C(j��)��(y��ng)����(j��)��(sh��)�H��(y��ng)�õ�Ҫ�����Дz��C(j��)���R����(sh��)��һ�(xi��ng)��Ҫָ��(bi��o)���R����(sh��)�֞��Ă�(g��)���֣��Ŵ��ʡ����ࡢ������R���b�� 3���D��_�����γɔz��C(j��)ݔ����̖(h��o) �C(j��)��ҕ�X(ju��)ϵ�y(t��ng)��(sh��)�H����һ��(g��)����D(zhu��n)�Q�b�ã����������������յ����R�����D(zhu��n)����ʲô��C(j��)��̎�������̖(h��o)���z��C(j��)����������ܵģ�Ҳ���ǹ��w��B(t��i)���І�Ԫ�� ��ӹܔz��C(j��)�l(f��)չ�^�磬20���o(j��)30������ё�(y��ng)�����̘I(y��)�ҕ�������ð������Ԫ������չ��M(j��n)�ЈD����У��������յ��ĈD���D(zhu��n)�Q��ģ�M늉���̖(h��o)ݔ�������� RS-170ݔ����ʽ�Ĕz��C(j��)��ֱ���c�����ҕ�@ʾ�����B�� ���w��B(t��i)�z��C(j��)����20���o(j��)60������ڣ�����(gu��)ؐ���Ԓ��(sh��)�(y��n)�Ұl(f��)����늺�����b�ã�CCD�������l(f��)չ����(l��i)�ġ����Ϸֲ��ڸ���(g��)��Ԫ�Ĺ������O���ľ�����л������И�(g��u)�ɣ�ͨ�^(gu��)��һ�����ݔ��ÿ��(g��)���O�ܵ�늉��}�_����(sh��)�F(xi��n)���D�����̖(h��o)�D(zhu��n)�Q�����̖(h��o)��Ŀ�ġ�ݔ����늉��}�_���п���ֱ����RS-170��ʽݔ���(bi��o)��(zh��n)�ҕ�@ʾ��������ݔ��Ӌ(j��)��C(j��)�ă�(n��i)�棬�M(j��n)�Д�(sh��)ֵ��̎����CCD�ǬF(xi��n)����õęC(j��)��ҕ�X(ju��)�������� �D��̎�����g(sh��) �C(j��)��ҕ�X(ju��)ϵ�y(t��ng)�У�ҕ�X(ju��)��Ϣ��̎�����g(sh��)��Ҫ��ه�ڈD��̎���������������D������(qi��ng)����(sh��)��(j��)���a�͂�ݔ��ƽ����߅���J�����ָ������ȡ���D���R(sh��)�e�c����ȃ�(n��i)�ݡ���(j��ng)�^(gu��)�@Щ̎����ݔ���D����|(zh��)���õ��ஔ(d��ng)�̶ȵĸ��ƣ��ȸ����ˈD���ҕ�X(ju��)Ч�����ֱ���Ӌ(j��)��C(j��)��(du��)�D���M(j��n)�з�����̎�����R(sh��)�e�� 1���D�������(qi��ng) �D�������(qi��ng)�����{(di��o)���D��Č�(du��)�ȶȣ�ͻ���D���е���Ҫ��(x��)��(ji��)������ҕ�X(ju��)�|(zh��)����ͨ�����ûҶ�ֱ���D�ļ��g(sh��)�M(j��n)�ЈD������(qi��ng)�� �D��ĻҶ�ֱ���D�DZ�ʾһ���D��Ҷȷֲ���r�Ľy(t��ng)Ӌ(j��)���ԈD�����c��(du��)�ȶȾo�����B�� ͨ������Ӌ(j��)��C(j��)�б�ʾ��һ�����S��(sh��)�ֈD��ɱ�ʾ��һ��(g��)��ꇣ������е�Ԫ����λ������(y��ng)����(bi��o)λ�õĈD��Ҷ�ֵ�����xɢ��������(sh��)��һ��ȡ 0��1��������255.�@��Ҫ����?y��n)��?j��)��C(j��)�е�һ��(g��)�ֹ�(ji��)����ʾ�Ĕ�(sh��)ֵ������0~255.���⣬����Ҳֻ�ֱܷ�32��(g��)���ҵĻҶȼ�(j��)�����ԣ���һ��(g��)�ֹ�(ji��)��ʾ�Ҷȼ��ɡ� ���ǣ�ֱ���D�H�ܽy(t��ng)Ӌ(j��)ij��(j��)�Ҷ����س��F(xi��n)�ĸ��ʣ���ӳ����ԓ�����ڈD���еĶ��S����(bi��o)����ˣ���ͬ�ĈD���п��ܾ�����ͬ��ֱ���D��ͨ�^(gu��)�Ҷ�ֱ���D���Π���Д�ԓ�D��������Ⱥͺڰ�(du��)�ȶȡ� ����@��һ���D���ֱ���DЧ�������룬����ͨ�^(gu��)ֱ���D���⻯̎�����g(sh��)���m��(d��ng)�ģ�����һ����֪�Ҷȸ��ʷֲ��D���е����ػҶ���ij�Nӳ��׃�Q��ʹ��׃��һ�����о���Ҷȸ��ʷֲ����D��(sh��)�F(xi��n)ʹ�D��������Ŀ�ġ� 2���D���ƽ�� �D���ƽ��̎�����g(sh��)���D���ȥ��̎������Ҫ�Ǟ���ȥ����(sh��)�H�����^(gu��)���У�������O(sh��)��ͭh(hu��n)������ɵĈD��ʧ�棬��ȡ������Ϣ��������֪����(sh��)�H�@�õĈD�����γɡ���ݔ�����պ�̎�����^(gu��)���У����ɱ���ش������ⲿ�ɔ_�̓�(n��i)���ɔ_�������D(zhu��n)�Q�^(gu��)��������Ԫ���`���ȵIJ������ԡ���(sh��)�ֻ��^(gu��)�̵�����������ݔ�^(gu��)���е��`���Լ��˞����صȣ�����(hu��)ʹ�D��׃�|(zh��)����ˣ�ȥ�������֏�(f��)ԭʼ�D���LjD��̎���е�һ��(g��)��Ҫ��(n��i)�ݡ� �ڱ����o(j��)�ġ���ʮ����l(f��)չ����(l��i)�ľ����V�����������Ƶ���Փ���A(ch��)����(sh��)�W(xu��)̎�����㣬���ڲ���FFT��Ӳ����(sh��)�F(xi��n)�ȃ�(y��u)�c(di��n)��һֱ�ڈD��V���I(l��ng)��ռ����Ҫ��λ�������� WIENER�V������Փ�Ϳ������V����Փ����������Ǿ��ԞV����������Ӌ(j��)���(f��)�s�ȸߣ������ڌ�(sh��)�r(sh��)̎����ȱ�c(di��n)���mȻ����(du��)��˹�������õ�ƽ�����ã�����(du��)�}�_��̖(h��o)�ɔ_��������ʽ�����ɔ_����Ч�����̖(h��o)߅��ģ������ˣ�1971�꣬�����W(xu��)��TUKEY����Ǿ��ӞV����������ֵ�V���������Ѿֲ��^(q��)���лҶȵ���ֵ����ݔ���Ҷȣ��������c�y(t��ng)Ӌ(j��)�W(xu��)��Փ�Y(ji��)������(l��i)��ʹ�õ������������^����،��D������л֏�(f��)����(l��i)�������ܱ��o(h��)�D���݆��߅�磬��ʹ��׃ģ���������(l��i)���Ǿ��ԞV����Փ�ڙC(j��)��ҕ�X(ju��)���t(y��)�W(xu��)�����Z(y��)��̎�����I(l��ng)�����ˏV���đ�(y��ng)�ã�ͬ�r(sh��)��Ҳ���^(gu��)��(l��i)��ʹԓ��Փ���о���v���l(f��)չ�� 3���D��Ĕ�(sh��)��(j��)���a�͂�ݔ ��(sh��)�ֈD��Ĕ�(sh��)��(j��)�����ஔ(d��ng)����ģ�һ��512*512��(g��)���صĔ�(sh��)�ֈD��Ĕ�(sh��)��(j��)����256 K�ֹ�(ji��)�������O(sh��)ÿ���ݔ25���D�t��ݔ?sh��)��ŵ����ʞ?2.4M����/�롣���ŵ�������ζ����Ͷ�Y��Ҳ��ζ���ռ��y�ȵ����ӡ���ˣ���ݔ�^(gu��)���У���(du��)�D��(sh��)��(j��)�M(j��n)�Љ��s�@�÷dz���Ҫ����(sh��)��(j��)�ĉ��s��Ҫͨ�^(gu��)�D��(sh��)��(j��)�ľ��a��׃�Q���s��ɡ� �D��(sh��)��(j��)���aһ������A(y��)�y(c��)���a�������D��(sh��)��(j��)�Ŀ��g׃��Ҏ(gu��)�ɺ�����׃��Ҏ(gu��)����һ��(g��)�A(y��)�y(c��)��ʽ��ʾ�����֪����ijһ���ص�ǰ�����������ֵ֮�����ù�ʽ�A(y��)�y(c��)ԓ����ֵ�������A(y��)�y(c��)���a��һ��ֻ���ݔ�D��(sh��)��(j��)����ʼֵ���A(y��)�y(c��)�`���˿Ɍ�8����/���؉��s��2����/���ء� ׃�Q���s�����nj������D��ֳ�һ��(g��)��(g��)С�ģ�һ��ȡ8*8��16*16����(sh��)��(j��)�K���ٌ��@Щ��(sh��)��(j��)�K���׃�Q���������Ķ���(g��u)�����m��(y��ng)��׃�Q���sϵ�y(t��ng)��ԓ�����Ɍ�һ���D��Ĕ�(sh��)��(j��)���s���锵(sh��)����Ď�ʮ��(g��)��ݔ���ڽ��ն���׃�Q��ȥ���ɡ� 4��߅���J�� �D��߅���J��̎����Ҫ�Ǽӏ�(qi��ng)�D���е�݆��߅���ͼ�(x��)��(ji��)���γ����������w߅�磬�_(d��)�������w�ĈD���з��x����(l��i)��?q��)���ʾͬһ���w����ą^(q��)��z�y(c��)����(l��i)��Ŀ�ġ���������ҕ�X(ju��)��Փ���㷨�еĻ�����(w��n)�}��Ҳ�����ںͺ���ҕ�X(ju��)�ɔ�����Ҫ����֮һ�� 5���D��ķָ� �D��ָ��nj��D��ֳ����ɲ��֣�ÿһ����(du��)��(y��ng)��ijһ���w���棬���M(j��n)�зָ�r(sh��)��ÿһ���ֵĻҶȻ�y������ijһ�N����y(c��)�ȶ�����ij���|(zh��)�nj������M(j��n)�з���������(j��)�����صĻҶ�ֵ���ɫ���l�V���ԡ����g���Ի�y�����Եȡ��D��ָ��LjD��̎�����g(sh��)�Ļ�������֮һ����(y��ng)�����T��Ⱦɫ�w�����������ϵ�y(t��ng)���C(j��)��ҕ�X(ju��)�ȷ��档 �D��ָ���Ҫ�ЃɷN������һ���b�ڶ������g�ĻҶ��ֵ�ָ�����Ǹ���(j��)�D��Ҷ�ֱ���D��(l��i)�Q���D����g�����ؾ������ֻ�����ˈD��Ҷ����������](m��i)�����ÈD���е�����������Ϣ��ʹ�÷ָ�Y(ji��)����(du��)��ʮ�����У����ǿ��g��^(q��)�����L(zh��ng)�ָ�������nj�(du��)��ij�N���x�ϣ���Ҷȼ�(j��)���M�����ݶȵȣ������������|(zh��)�������Bͨ����(g��u)�ɷָ�^(q��)��ԓ�����кܺõķָ�Ч������ȱ�c(di��n)���\(y��n)���(f��)�s��̎���ٶ����������ķ�����߅��ۙ������Ҫ�����ڱ���߅�����|(zh��)����ۙ߅�����γ��]��݆������Ŀ��(bi��o)�ָ����(l��i)���F�w�D��(sh��)��(j��)�Y(ji��)��(g��u)���͘�(bi��o)ӛ�ɳڵ�����ͬ�����������ؿ��g�ֲ��P(gu��n)ϵ����߅���������������Ěw����������֪�R(sh��)�ķָ���t�����þ�������(y��n)��Ϣ�ͽy(t��ng)Ӌ(j��)���ԣ����Ȍ�(du��)�D���M(j��n)�г�ʼ�ָ��ȡ�^(q��)��������Ȼ�������I(l��ng)��֪�R(sh��)�ƌ�(d��o)�^(q��)��Ľ�ጣ�������(j��)��ጌ�(du��)�^(q��)���M(j��n)�кϲ��� 6���D����R(sh��)�e �D����R(sh��)�e�^(gu��)�̌�(sh��)�H�Ͽ��Կ�����һ��(g��)��(bi��o)ӛ�^(gu��)�̣��������R(sh��)�e�㷨��(l��i)��e�������ѷָ�õĸ���(g��)���w���o�@Щ���w�x���ض��Ę�(bi��o)ӛ�����ǙC(j��)��ҕ�X(ju��)ϵ�y(t��ng)�����ɵ�һ��(g��)�΄�(w��)�� ����?q��ng)D���R(sh��)�e�����y���ɷ֞����(w��n)�}����һ��R(sh��)�e��(w��n)�}�У��D���е����ر��_(d��)��ijһ���w��ij�N�ض���Ϣ�����b�ЈD���е�ijһ���ش�������ijһλ�õ����һ�����V���εķ������ԣ�ͨ�^(gu��)�������Єe��ԓ����ķN��ڶ��(w��n)�}�У����R(sh��)�e�������ε����w�����S�D����Ϣ�ѽ�(j��ng)����R(sh��)�eԓ���w���������R(sh��)�e��ijЩ���з�(w��n)����ҕ��������S�w�R(sh��)�e�ȡ����@�(w��n)�}�����һ�(w��n)�}���ױ�ʾ������ʸ�������R(sh��)�e�^(gu��)���У���(y��ng)�Ȍ����R(sh��)�e���w���_�؏ĈD��ı����зָ����(l��i)�����O(sh��)������������(l��i)�ĈD�������w�Č��ԈD�c�ٶ�ģ�͎�(k��)�Č��ԈD֮�gƥ�䡣�����(w��n)�}����ݔ��Ķ��S�D��Ҫ�؈D��2.5�S�D�ȣ��ó����y(c��)���w�����S��ʾ���@�������Ό��[�������S��Ϣ��ȡ����(l��i)�Ć�(w��n)�}����(d��ng)�ǽ��о��ğ��c(di��n)�� Ŀǰ���ڈD���R(sh��)�e�ķ�����Ҫ�֞�Q����Փ�ͽY(ji��)��(g��u)�������Q����Փ�����Ļ��A(ch��)�ǛQ�ߺ���(sh��)����������(du��)ģʽ�����M(j��n)�з���R(sh��)�e�����Զ��r(sh��)��������y(t��ng)Ӌ(j��)�y��������A(ch��)�ģ��Y(ji��)��(g��u)�����ĺ����nj����w�ֽ����ģʽ��ģʽ��Ԫ������ͬ�����w�Y(ji��)��(g��u)�в�ͬ�Ļ�Ԫ������Q�ַ�������ͨ�^(gu��)��(du��)δ֪���w���ýo����ģʽ��Ԫ������a߅�磬�õ��ַ������ٸ���(j��)�ַ����Д����Č���@��һ�N��ه�ڷ�̖(h��o)�������y(c��)���w֮�g�P(gu��n)ϵ�ķ����� |
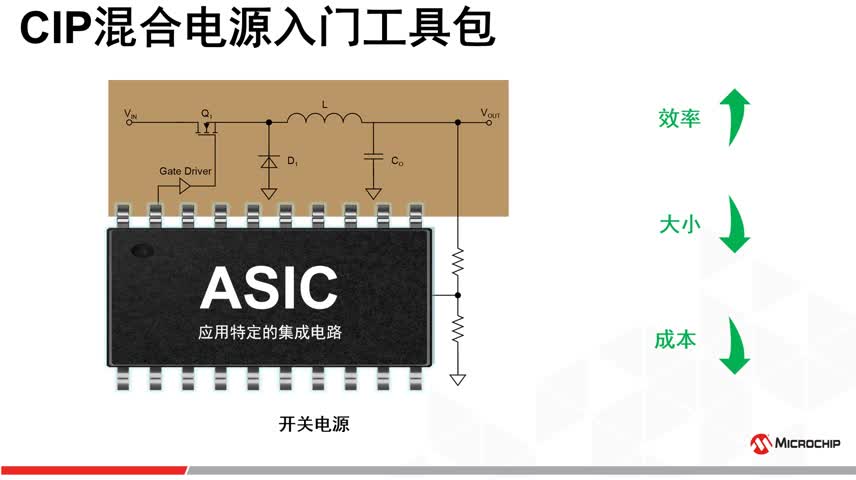
| ��ԴĿǰʹ�õ�LED��Դ�ı��^��һ�c(di��n)���mȻǰ�ڳɱ����u��?z��)���һЩ�����Ǻ��ھS�o(h��)�ɱ��^�ͣ����ā�(l��i)�f(shu��)߀�DŽ���ģ�ȱ�c(di��n)��������߀��������һ�c(di��n)�� |
|
�C(j��)���˿��Կ���һ��(g��)agent ���еĸ���(g��)�����ֿ��Կ���mas mas���ԺܺõĽ�Q�@Щ��(w��n)�} |
| study |
| ���x������MARK��W(xu��)��(x��)�� |
| �x�x������������������ |
| �D����R(sh��)�e �ܺõ� |