|
實(shí)驗(yàn)名稱(chēng):靜電懸浮裝置控制算法與懸浮實(shí)驗(yàn) 研究方向:為了實(shí)現(xiàn)材料樣品的懸浮控制和加熱測(cè)溫,靜電懸浮實(shí)驗(yàn)裝置配置了光電傳感器、測(cè)溫儀、激光器、CCD相機(jī)、電機(jī)等復(fù)雜的光機(jī)電外圍設(shè)備。并且在實(shí)驗(yàn)過(guò)程中還要配置多種工程參數(shù),實(shí)時(shí)采集分析各種科學(xué)數(shù)據(jù),所以采用綜合監(jiān)控軟件集成對(duì)流程控制、參數(shù)配置、數(shù)據(jù)存儲(chǔ)和查看等功能,方便用戶(hù)操作實(shí)驗(yàn)裝置。 測(cè)試設(shè)備:高壓放大器、光電傳感器、測(cè)溫儀、探測(cè)器等。 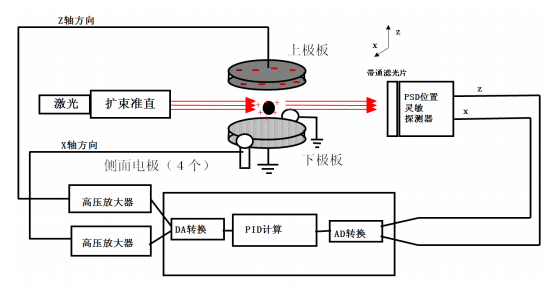 圖1:靜電懸浮位置控制模型 樣品懸浮位置的穩(wěn)定控制是靜電懸浮的關(guān)鍵技術(shù),懸浮控制過(guò)程包括樣品充電、脫離極板和穩(wěn)定懸浮。懸浮控制的難點(diǎn)在于直徑2mm樣品要在間距8mm的極板之間完成懸浮過(guò)程,穩(wěn)定懸浮后樣品距離上下極板只有3mm的間距,對(duì)位置測(cè)量精度要求高。如果不加控制,樣品在10ms的時(shí)間就從下極板撞到上極板,因此懸浮控制的周期要很短。另外,樣品初始懸浮時(shí)受下極板鏡像引力的作用,當(dāng)脫離下極板后會(huì)急速上升,增加了控制算法的難度。懸浮控制系統(tǒng)的模型如圖1所示。 懸浮樣品的位置是被控對(duì)象,通過(guò)PSD傳感器檢測(cè)樣品的當(dāng)前位置作為反饋信號(hào)輸入,高壓放大器是控制系統(tǒng)的輸出,高壓放大器作用于上下電極,改變極板間的電場(chǎng)強(qiáng)度,進(jìn)而調(diào)節(jié)樣品的懸浮位置。控制器根據(jù)反饋的當(dāng)前時(shí)刻的位置信號(hào),通過(guò)PID運(yùn)算,得到下一時(shí)刻的輸出信號(hào),形成負(fù)反饋的位置控制。 實(shí)驗(yàn)結(jié)果: 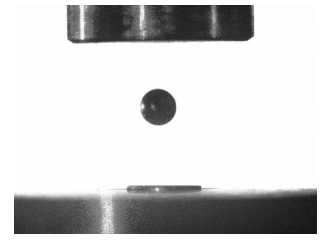 圖2:樣品穩(wěn)定懸浮圖像 圖3:懸浮過(guò)程的位置和電壓變化曲線(xiàn) 高壓放大器推薦:ATA-7025 圖:ATA-7025高壓放大器指標(biāo)參數(shù) |
